

【導(dǎo)讀】多光譜遙感是指用具有兩個(gè)以上波譜通道的傳感器對(duì)地物進(jìn)行同步成像的一種遙感技術(shù),它將目標(biāo)物體反射輻射的電磁波信息分成若干波譜段進(jìn)行接收和記錄。實(shí)現(xiàn)多光譜遙感的傳感器為多光譜相機(jī),一次拍攝可形成多幅不同光譜的影像。
(1.中國(guó)科學(xué)院遙感與數(shù)字地球研究所遙感科學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室, 北京 100101;2.中國(guó)科學(xué)院遙感與數(shù)字地球研究所數(shù)字地球重點(diǎn)實(shí)驗(yàn)室, 北京 100094;3.中國(guó)科學(xué)院地理科學(xué)與資源研究所資源與環(huán)境信息系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室, 北京 100101;4.北京農(nóng)業(yè)智能裝備技術(shù)研究中心, 北京 100097)
摘要:隨著光譜傳感技術(shù)和圖像處理與分析軟件的日益成熟,無人機(jī)多光譜軟硬件一體化程度和觀測(cè)精度及易用性得到極大的發(fā)展。無人機(jī)多光譜遙感已在農(nóng)業(yè)、林業(yè)、資源、生態(tài)、環(huán)境保護(hù)等領(lǐng)域應(yīng)用日益廣泛。本文概述了無人機(jī)飛行平臺(tái)、多光譜傳感器等硬件技術(shù)的發(fā)展,和無人機(jī)遙感影像的幾何校正、輻射校正圖像處理技術(shù)及數(shù)據(jù)處理流程,并對(duì)無人機(jī)多光譜遙感在植被長(zhǎng)勢(shì)監(jiān)測(cè)、存在問題、精細(xì)分類與地物識(shí)別、病蟲害監(jiān)測(cè)、生物量和產(chǎn)量估算等方面的應(yīng)用潛力和發(fā)展方向進(jìn)行了系統(tǒng)分析和總結(jié),以期為開展相關(guān)領(lǐng)域研究提供參考。建議各行業(yè)部門的專業(yè)人員與遙感、計(jì)算機(jī)科學(xué)等領(lǐng)域的專家密切合作,制訂無人機(jī)多光譜遙感技術(shù)的相關(guān)標(biāo)準(zhǔn)和規(guī)范,共同推進(jìn)并普及無人機(jī)多光譜遙感技術(shù)。
0 引言
多光譜遙感是指用具有兩個(gè)以上波譜通道的傳感器對(duì)地物進(jìn)行同步成像的一種遙感技術(shù),它將目標(biāo)物體反射輻射的電磁波信息分成若干波譜段進(jìn)行接收和記錄[1-2]。實(shí)現(xiàn)多光譜遙感的傳感器為多光譜相機(jī),一次拍攝可形成多幅不同光譜的影像[2]。
輕小型無人機(jī)遙感系統(tǒng)作為低空遙感系統(tǒng)的重要組成部分,具有機(jī)動(dòng)靈活、操作簡(jiǎn)便、按需獲取高時(shí)空分辨率數(shù)據(jù)且應(yīng)用成本低的優(yōu)勢(shì),有效彌補(bǔ)了衛(wèi)星及大型航空遙感系統(tǒng)在地表分辨率低、重訪周期長(zhǎng)、受水汽影響大等不足,為中小尺度的遙感應(yīng)用研究提供了新的工具[3-4]。輕小型無人機(jī)遙感系統(tǒng)是在輕小型無人機(jī)平臺(tái)上配備相應(yīng)的傳感器(可見光相機(jī)、多光譜相機(jī)、高光譜儀、紅外傳感器、激光雷達(dá)等),利用通信技術(shù)和定位定姿技術(shù)快速無損獲取關(guān)于目標(biāo)地物的高分辨率影像及數(shù)據(jù),經(jīng)過處理的數(shù)據(jù)作為參數(shù)輸入遙感反演模型,相關(guān)產(chǎn)出可用于參數(shù)提取或者行業(yè)具體應(yīng)用。
目前,搭載在輕小型無人機(jī)平臺(tái)上的多光譜遙感應(yīng)用日益廣泛,為系統(tǒng)了解該技術(shù)及其應(yīng)用領(lǐng)域,本文對(duì)飛行平臺(tái)、多光譜相機(jī)等硬件技術(shù)加以概述,并從幾何和輻射校正等方面對(duì)多光譜圖像數(shù)據(jù)處理技術(shù)及數(shù)據(jù)處理流程進(jìn)行梳理和總結(jié),同時(shí)對(duì)小型無人機(jī)多光譜遙感技術(shù)未來應(yīng)用領(lǐng)域和發(fā)展方向進(jìn)行系統(tǒng)分析和展望。
1 輕小型無人機(jī)多光譜遙感系統(tǒng) 1.1 無人機(jī)遙感系統(tǒng)
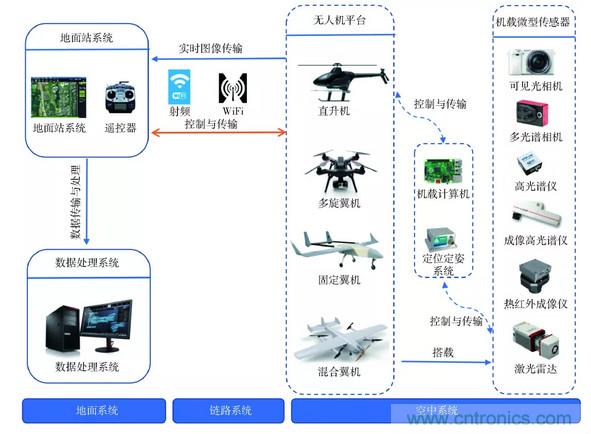
完整的輕小型無人機(jī)遙感系統(tǒng)如圖1所示,主要包括:無人機(jī)平臺(tái)、微小型傳感器、地面站系統(tǒng)和數(shù)據(jù)處理系統(tǒng)[5-9]。其中,無人機(jī)平臺(tái)即無人機(jī)本身,是搭載飛控、導(dǎo)航定位系統(tǒng)及傳感器等設(shè)備的載體。微小型傳感器是指安裝于無人機(jī)平臺(tái)上的獲取遙感數(shù)據(jù)的傳感器及其控制裝置,其中的控制裝置通常與導(dǎo)航、飛控系統(tǒng)進(jìn)行一體化設(shè)計(jì),具有觸發(fā)控制傳感器、記錄拍照時(shí)刻的位置及姿態(tài)信息的功能。地面站系統(tǒng)主要用于飛行參數(shù)設(shè)置、路徑規(guī)劃和無人機(jī)實(shí)時(shí)操控等。數(shù)據(jù)處理系統(tǒng)主要完成遙感影像的數(shù)據(jù)存儲(chǔ)、處理及產(chǎn)品展示等。地面站系統(tǒng)與飛控之間通過數(shù)據(jù)傳輸系統(tǒng)進(jìn)行通信,主要實(shí)現(xiàn)飛行數(shù)據(jù)、控制指令、圖像數(shù)據(jù)的實(shí)時(shí)交互傳輸?shù)取?/div>
 (2)
(2)
1.2 無人機(jī)平臺(tái)
輕小型無人機(jī)飛行平臺(tái)種類繁多,有無人直升機(jī)、固定翼無人機(jī)、多旋翼無人機(jī)、混合翼無人機(jī)等多種機(jī)型[10-11]。飛艇與飛翼無人機(jī)由于體積和重量較大[7],不在本文的討論之列。直升機(jī)起降靈活,可自由懸停,載重也較大,但操作復(fù)雜,成本較高[12-13]。固定翼無人機(jī)飛行速度快,續(xù)航時(shí)間長(zhǎng),覆蓋面積廣,但飛行速度難以根據(jù)需求調(diào)節(jié),且載荷較小[14]。多旋翼無人機(jī)飛行速度可控,飛行高度可調(diào)且可以低空飛行,起降靈活,成本較低,但是其飛行時(shí)間較短,載荷能力也較小[15]。一般來說,小型無人機(jī)的有效載荷為10 kg以下,最大飛行高度3 000 m以內(nèi),最大飛行速度不超過33 m/s[6]。從組成部分來說,無人機(jī)平臺(tái)主要包括無人機(jī)體、飛行控制系統(tǒng)、遙控器、能量系統(tǒng)以及地面站[6,10]。其中,地面站主要完成航線規(guī)劃和飛行參數(shù)設(shè)置,其自動(dòng)化及智能化程度的提高顯著降低了無人機(jī)飛行平臺(tái)的操作難度,當(dāng)對(duì)同一個(gè)試驗(yàn)區(qū)進(jìn)行多次重復(fù)觀測(cè)時(shí),利用地面站航線信息可方便實(shí)現(xiàn)飛行任務(wù)的重復(fù)執(zhí)行。飛行控制系統(tǒng)主要完成飛機(jī)的操控,如起飛、降落、空中飛行姿態(tài)控制等,是無人機(jī)系統(tǒng)的關(guān)鍵技術(shù)之一??傮w而言,小型固定翼無人機(jī)和電動(dòng)多旋翼是目前最常用的飛行平臺(tái),因?yàn)檫@些飛機(jī)在價(jià)格、載荷能力和飛行時(shí)間等方面進(jìn)行了可行的折衷處理[2,16]。
圖1 無人機(jī)遙感系統(tǒng)組成圖
1.3 小微型多光譜傳感器
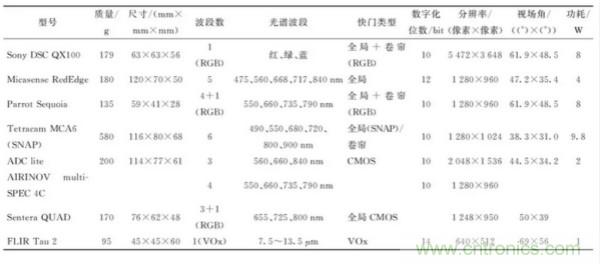
受限于小型無人機(jī)的有效負(fù)荷能力,一般要求多光譜傳感器必須滿足質(zhì)量輕、體積小、精度高、功耗低的要求。本文的小/微型多光譜傳感器僅包括質(zhì)量在4 kg以內(nèi)的商業(yè)化產(chǎn)品[17]。按照探測(cè)波長(zhǎng)的不同,這些傳感器主要分為可見光波段(400~760 nm)數(shù)碼相機(jī)(Digital camera)、可見近紅外波段(400~1 100 nm)多光譜相機(jī)(Spectral camera)、熱紅外波段(3.6~13.5 μm)相機(jī)(Thermal camera)等。其中,代表性的小/微型多光譜傳感器主要有ADC lite(Tetracam Inc., Chatsworth, CA, USA)、RedEdge(Micasensen Inc., Seattle, WA, USA)、Parrot Sequoia(Parrot Inc., Paris, France)、FLIR Tau 2 (FLIR Systems Inc., USA)等,其性能參數(shù)對(duì)比如表1所示。
表1小微型多光譜傳感器產(chǎn)品比較分析
型號(hào)質(zhì)量/g尺寸/(mm×mm×mm)波段數(shù)光譜波段快門類型數(shù)字化位數(shù)/bit分辨率/(像素×像素)視場(chǎng)角/((°)×(°))功耗/WSonyDSCQX10017963×63×561(RGB)紅、綠、藍(lán)全局+卷簾(RGB)105472×364861.9×48.58MicasenseRedEdge180120×70×505475、560、668、717、840nm全局121280×96047.2×35.44ParrotSequoia13559×41×284+1(RGB)550、660、735、790nm全局+卷簾(RGB)101280×96061.9×48.58TetracamMCA6(SNAP)580116×80×686490、550、680、720、800、900nm全局(SNAP)/卷簾101280×102438.3×31.09.8ADClite200114×77×613560、660、840nmCMOS102048×153644.5×34.22AIRINOVmulti-SPEC4C4550、660、735、790nm101280×960SenteraQUAD17076×62×483+1(RGB)655、725、800nm全局CMOS1248×95050×39FLIRTau29545×45×601(VOx)7.5~13.5μmVOx14640×51269×561
1.3.1小型多光譜相機(jī)原理與分類
可見光波段數(shù)碼相機(jī)是無人機(jī)遙感系統(tǒng)中應(yīng)用最為廣泛的一類傳感器,可快速獲取可見光波段灰度或者彩色圖像。可見光波段數(shù)碼相機(jī)最大的優(yōu)勢(shì)是成本低、像素?cái)?shù)高、操作簡(jiǎn)單。無人機(jī)遙感獲取可見光影像對(duì)環(huán)境要求相對(duì)較低,晴天和陰天條件下均可進(jìn)行數(shù)據(jù)采集,但對(duì)曝光設(shè)定有一定的要求,云的遮擋和環(huán)境光線的變化易導(dǎo)致圖像曝光不足或過度。
可見近紅外波段多光譜相機(jī)通過分光獲取不同波段的單色圖像,根據(jù)分光方式的不同可分為單鏡頭加分光系統(tǒng)[18]和多鏡頭分光[19-20]等類型。其中,多鏡頭分光是通過在多個(gè)成像焦面?zhèn)鞲衅髑岸朔謩e設(shè)置不同譜段的窄帶干涉濾光片的方式實(shí)現(xiàn)[21]。 按感光元件的不同,多光譜傳感器分為CCD(Charge coupled device)相機(jī)和CMOS(Complementary metal oxide semiconductor)相機(jī)兩種。CCD在影像品質(zhì)等方面均優(yōu)于CMOS,而CMOS則具有低成本、低功耗以及高整合度的特點(diǎn)。對(duì)應(yīng)于采用CCD傳感器的多光譜相機(jī)多采用全局快門(如RedEdge、Sequoia等相機(jī)),所有像素點(diǎn)同時(shí)收集光線,同時(shí)曝光,有利于在飛行狀態(tài)下獲取無畸變的圖像。而對(duì)應(yīng)于CMOS傳感器的多光譜相機(jī)多采用卷簾快門(如MCA6)。目前,主流的小型多光譜相機(jī)一般是采用獨(dú)立的鏡頭與傳感器,傳感器前端設(shè)置不同波段的濾光片(如Tetracam MCA 6、Micasense RedEdge、Parrot Sequoia等相機(jī))實(shí)現(xiàn)多波段影像的同時(shí)獲取。
在實(shí)際應(yīng)用中,市場(chǎng)上消費(fèi)級(jí)數(shù)碼相機(jī)的面陣探測(cè)器前面都包含一個(gè)阻止紫外線和紅外線帶通濾波器,用于僅透過入射輻射中的可見光部分,但實(shí)際上探測(cè)器的響應(yīng)波長(zhǎng)可以達(dá)到近紅外波段的900~1 100 nm,這就為將數(shù)碼相機(jī)改造為多光譜相機(jī)提供了可能[22]。如LELONG等[23]將數(shù)碼相機(jī)(Canon EOS 350D和SONY DSC-F828)的可見光帶通濾光片去除,改造成為一個(gè)包含紅(R)、綠(G)、藍(lán)(B)、近紅外(NIR)4個(gè)波段多光譜相機(jī)(光譜范圍覆蓋570~850 nm)。此外,應(yīng)用中還可以通過將數(shù)碼相機(jī)與獨(dú)立的紅外相機(jī)(如Canon S110 NIR)[24-25]組合起來實(shí)現(xiàn)無人機(jī)多光譜觀測(cè)。
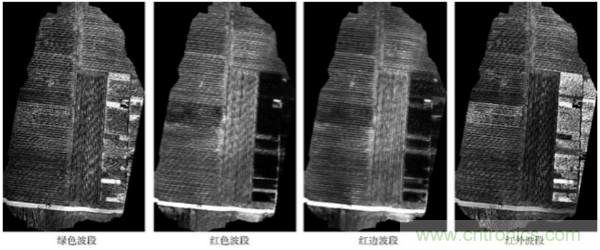
圖2 多光譜相機(jī)拍攝的多光譜圖像拼接圖(2017年,河南省安陽市)
熱紅外相機(jī)[26]通過對(duì)熱紅外波段(2~1 000 μm)敏感的探測(cè)器對(duì)目標(biāo)成像,能反映出目標(biāo)表面的溫度信息。由于氣孔導(dǎo)度、光合特性和蒸騰速率與植被冠層溫度密切相關(guān),高分辨率的紅外熱成像技術(shù)可以用來確定植被在非生物脅迫狀態(tài)下的響應(yīng),如水分脅迫[27-28]等。此外,利用哺乳動(dòng)物溫度恒定的特點(diǎn),熱紅外相機(jī)還可用于野生動(dòng)物物種的精確識(shí)別[29]。受限于熱紅外探測(cè)器的像元數(shù)目(如FLIR Tau2的像素?cái)?shù)為640×512),目前熱紅外相機(jī)的分辨率較低,當(dāng)對(duì)非均質(zhì)目標(biāo)進(jìn)行觀測(cè)時(shí),混合像元(例如一個(gè)像元包含同時(shí)來自土壤和植被的信號(hào))的存在會(huì)顯著影響觀測(cè)的精度[30]。利用更高分辨率的RGB圖像與熱紅外數(shù)據(jù)融合可以降低混合像元的影響[6]。此外,無人機(jī)只能搭載小型熱成像攝像機(jī),這些設(shè)備通常使用非制冷的微測(cè)輻射熱計(jì)傳感器(如氧化釩VOx),傳感器測(cè)量值溫漂較大[28],另外,還需要消除背景溫度(包括太陽輻射、環(huán)境溫度和風(fēng)速等)的影響[31],因此,必須選擇合適的方法對(duì)熱紅外數(shù)據(jù)進(jìn)行大氣糾正并進(jìn)一步開展現(xiàn)場(chǎng)校準(zhǔn)[28,32]。
1.3.2多光譜傳感器獲取的信息
本科院校圖書館、公共圖書館與科研院所圖書館對(duì)新進(jìn)人才需求較大,但對(duì)圖情專業(yè)畢業(yè)生而言,不同類型圖書館的要求不盡相同。具體來說,公共圖書館對(duì)圖情專業(yè)畢業(yè)生專業(yè)技能要求偏向操作性;本科院校圖書館專業(yè)要求較高,并希望具有其他專業(yè)背景;科研院所圖書館對(duì)圖情專業(yè)畢業(yè)生要求最高,要求其能獨(dú)立開展參考咨詢業(yè)務(wù),并具備一定的科研能力。
多光譜相機(jī)輸出的影像數(shù)據(jù)格式類型包括JPEG、TIFF或RAW等,圖像的數(shù)字化位數(shù)一般為8~12位。由于小型多光譜相機(jī)的像元數(shù)較小,并且飛行高度較低,因此單幅影像的成像面積較小,將飛行中獲取的多幅影像進(jìn)行拼接、校準(zhǔn)和計(jì)算可以獲取大幅拼接影像及一系列的光譜指數(shù)圖像數(shù)據(jù)。圖2展示了Sequoia相機(jī)拍攝的多光譜圖像的拼接圖,圖中包括4個(gè)不同波段的拼接圖像。根據(jù)多光譜相機(jī)具體的波段設(shè)置,可獲取的植被指數(shù)主要包括:比值植被指數(shù)(Ratio vegetation index,RVI)、歸一化植被指數(shù)(Normalized difference vegetation index,NDVI)、土壤調(diào)節(jié)植被指數(shù)(Optimized soil adjusted vegetation index,OSAVI)、氮素反射指數(shù) (Nitrogen reflectance index,NRI)、增強(qiáng)植被指數(shù)(Enhanced vegetation index,EVI)、轉(zhuǎn)換型葉綠素吸收反射率指數(shù)(Transformed chlorophyll absorption ratio index,TCARI)和光化學(xué)植被指數(shù)(Photochemical reflectance index,PRI)等。另外,利用無人機(jī)多光譜影像數(shù)據(jù)還可以生成數(shù)字表面模型DSM(Digital surface model)信息。綜上所述,無人機(jī)多光譜系統(tǒng)可以獲取關(guān)于地物的多光譜信息、紋理信息和結(jié)構(gòu)信息[33]。
1.4 無人機(jī)飛行參數(shù)設(shè)置
常規(guī)無人機(jī)的設(shè)置參數(shù)包括飛行高度、飛行速度、飛行軌跡規(guī)劃等。這些參數(shù)往往相互影響,需要相互調(diào)整配合才能保證無人機(jī)遙感系統(tǒng)實(shí)現(xiàn)最佳的數(shù)據(jù)獲取能力。對(duì)于多光譜無人機(jī)遙感系統(tǒng),飛行的高度決定了地表分辨率,飛行的航向重疊率和航間重疊率決定了拼接的質(zhì)量。傳統(tǒng)航空攝影技術(shù)規(guī)范中航向重疊度(53%~65%)和旁向重疊度(15%~40%)要求較高[34],獲取的數(shù)據(jù)量較大,因此數(shù)據(jù)采集處理的時(shí)效性較低,在應(yīng)急救援和災(zāi)害損失調(diào)查等時(shí)效性要求較高的特殊領(lǐng)域,或者需要大面積采集圖像的應(yīng)用場(chǎng)景下,低重疊度(15%~30%)的數(shù)據(jù)采集方式和處理方法越來越受到重視[35],韓峰等[36]通過對(duì)無人機(jī)搭載的Micro MCA12 Snap多光譜數(shù)據(jù)進(jìn)行處理分析,在算法和軟件的支持下,航向30%左右的低重疊度無人機(jī)圖像拼接完全可以得到適合所有類型應(yīng)急的大面積圖像數(shù)據(jù)和DSM數(shù)據(jù),特別是在現(xiàn)場(chǎng)應(yīng)急響應(yīng)的使用中,采用低重疊度的拍攝方法和拼接方法可極大地提高應(yīng)急響應(yīng)時(shí)間。在實(shí)際應(yīng)用中,為了保證拼接的質(zhì)量,對(duì)于森林或者稠密的作物,通常建議的多光譜相機(jī)的航向重疊率為75%~85%,旁向重疊率為60%~70%。為滿足影像重疊度要求,實(shí)際作業(yè)中需要根據(jù)作業(yè)區(qū)域、飛行高度、圖像傳感器參數(shù)、地面分辨率等參數(shù)進(jìn)行航線規(guī)劃,并且將相機(jī)的拍照幀頻與無人機(jī)的飛行速度進(jìn)行合理匹配,其相關(guān)關(guān)系為
f/H=S/G (1)
式中 f——相機(jī)焦距 H——飛行高度
S——相機(jī)傳感器電荷耦合元件單個(gè)像元大小
G——影像的地面分辨率
2 無人機(jī)多光譜信息獲取與數(shù)據(jù)處理
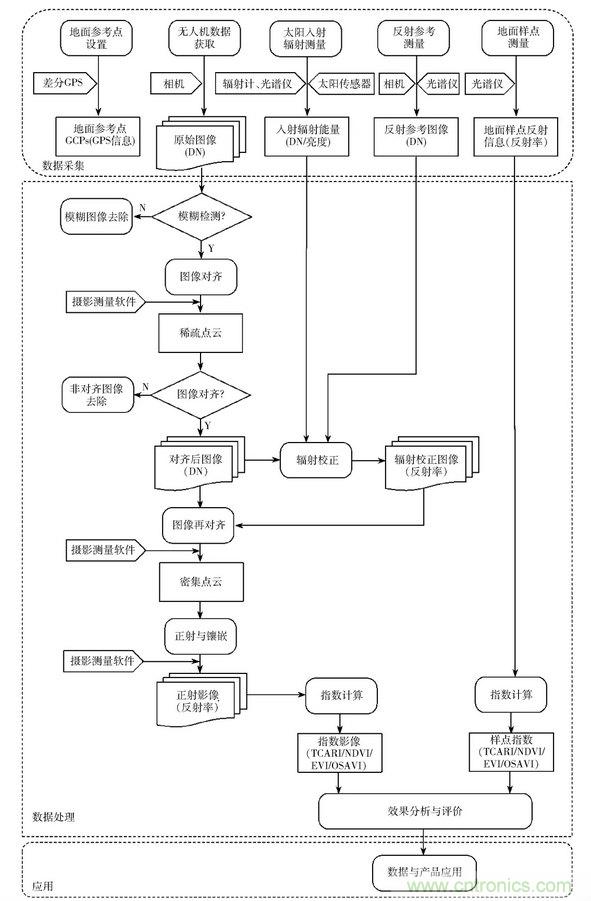
多光譜飛行數(shù)據(jù)為各個(gè)波段獨(dú)立的覆蓋范圍較小的照片[37],經(jīng)過攝影測(cè)量處理和輻射校準(zhǔn)處理,可以獲取大幅面的具有確定反射信息的影像。數(shù)據(jù)處理流程如圖3所示,主要包括多光譜數(shù)據(jù)處理、圖像拼接、幾何校正、輻射校正和遙感產(chǎn)品生成等。
2.1 攝影測(cè)量處理
攝影測(cè)量處理是將大量的單波段的無人機(jī)多光譜圖像自動(dòng)拼接為無縫多光譜正射影像并且進(jìn)行幾何校正和地理配準(zhǔn)。
大量自動(dòng)化攝影測(cè)量工具軟件如Pix4Dmapper(Pix4D SA, Lausanne, Switzerland)[38]、PhotoScan(Agisoft LLC, St.Petersbueg, Russia)[39]、ERDAS LPS(Leica Photogrammetry Suite, Leica, German)[28,40]、INPHO(Trimble,USA)等的出現(xiàn)為無人機(jī)多光譜數(shù)據(jù)的快速處理及廣泛應(yīng)用提供了便利。需要注意的是多光譜圖像一般具有多個(gè)波段,用作特征匹配的波段選擇對(duì)于匹配的結(jié)果影響顯著[41],因此需要根據(jù)地物的反射特征、環(huán)境條件等進(jìn)行特殊選擇[37]。無人機(jī)多光譜系統(tǒng)獲取的多光譜圖片一般是通過飛機(jī)的機(jī)載GPS進(jìn)行地理標(biāo)記,在處理過程中,圖像集在整個(gè)研究區(qū)域設(shè)置多個(gè)地理參考地面控制點(diǎn)(GCP),這些控制點(diǎn)可使用測(cè)量級(jí)GPS以厘米的精度進(jìn)行地理定位,根據(jù)區(qū)域覆蓋,可以靈活調(diào)整GCP數(shù)量[38]。圖像數(shù)據(jù)經(jīng)過初始對(duì)齊操作后,再利用控制點(diǎn)作為標(biāo)記來優(yōu)化稀疏點(diǎn)云并且將圖像重新定向?yàn)榇蟮刈鴺?biāo)系[42]。高林等[43]對(duì)拼接后多光譜圖像采用ENVI 軟件的Image to Image模塊,以高精度數(shù)碼正射影像為參考圖像,在圖像不同位置均勻選取30個(gè)參考點(diǎn)進(jìn)行幾何校正,經(jīng)檢驗(yàn)影像幾何糾正誤差小于0.5個(gè)像元。幾何校正還可以使用ArcGIS(ESRI, Redlands, CA, USA)實(shí)現(xiàn),選擇預(yù)設(shè)控制點(diǎn)或者地面特征點(diǎn)作為地理參考點(diǎn)[44]。楊貴軍等[45]開展了基于無人機(jī)低精度 POS 數(shù)據(jù)的無人機(jī)數(shù)據(jù)幾何校正研究,面向多遙感載荷獲取的無人機(jī)遙感數(shù)據(jù),實(shí)現(xiàn)無地面控制點(diǎn)的影像幾何校正。
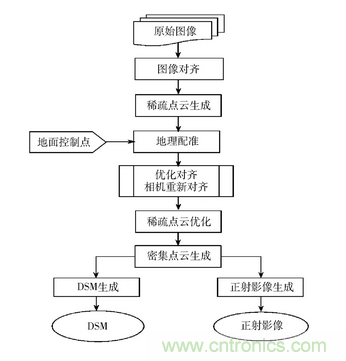
以PhotoScan軟件處理RedEdge多光譜相機(jī)數(shù)據(jù)生成正射影像為例,其數(shù)據(jù)處理的流程如圖4所示。①圖像對(duì)齊,該軟件在圖像中查找同名點(diǎn)并進(jìn)行匹配,還可以確定每幅圖像的相機(jī)位置并優(yōu)化相機(jī)校準(zhǔn)參數(shù),這個(gè)過程輸出的是稀疏點(diǎn)云。②使用地面控制點(diǎn)的坐標(biāo)對(duì)圖像進(jìn)行地理配準(zhǔn)。為了優(yōu)化攝像機(jī),可以使用漸進(jìn)式選擇工具根據(jù)重建不確定性、投影精度和重投影誤差等參數(shù)進(jìn)行稀疏點(diǎn)云過濾,之后圖像被重新對(duì)齊,大大提高準(zhǔn)配準(zhǔn)的準(zhǔn)確性。③基于估計(jì)的相機(jī)位置和圖像本身,由軟件構(gòu)建密集點(diǎn)云。④建立數(shù)字表面模型DSM,并在此基礎(chǔ)上生成正射影像。
1981年,我出生在爺爺曾經(jīng)住過的茅草屋里,那一年是他去世的第三年。聽父親說,爺爺一輩子從不計(jì)較個(gè)人得失,臨終前也不占集體的一點(diǎn)便宜。因此,這間茅草屋承載著爺爺?shù)墓鈽s傳統(tǒng)和我對(duì)他唯一的記憶,即便四處漏風(fēng)、漏雨,全家人依然沒有離開它的打算。
圖3 無人機(jī)多光譜數(shù)據(jù)處理流程
圖4 攝影測(cè)量處理流程圖
需要注意的是對(duì)多光譜進(jìn)行攝影測(cè)量處理有可能改變?cè)紙D像的DN(Digital number)值[42],這在定量遙感應(yīng)用中往往是不能接受的,因此還需要探索更好的多光譜圖像攝影測(cè)量處理方法[37]。
2.2 輻射校正
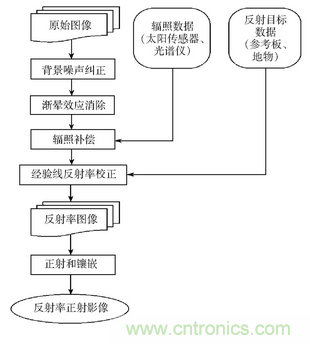
輻射校正為將傳感器的DN值轉(zhuǎn)換為傳感器的輻射亮度提供傳遞函數(shù),用于克服太陽角度、雙向反射分布函數(shù)(BRDF)效應(yīng)、云的陰影、相機(jī)增益及曝光時(shí)間等因素對(duì)傳感器測(cè)量值的影響[8]。輻射校正的流程如圖5所示。
圖5 輻射校正流程圖
由于飛行高度較低,通常無人機(jī)影像相比衛(wèi)星及有人飛機(jī)獲取的影像具有更好的輻射均一性[46],可以省略大氣糾正[47]。
輻射校正之前需要針對(duì)每幅圖像進(jìn)行背景噪聲消除和漸暈效應(yīng)消除[48]。圖像背景噪聲源可分為信號(hào)相關(guān)噪聲(光子散粒噪聲)和信號(hào)無關(guān)噪聲(暗電流、放大器噪聲、量化誤差)。只要噪聲不超過模數(shù)轉(zhuǎn)換器的量化間隔,這些噪聲源中的一些(如量化誤差)就可以忽略不計(jì)。 然而,多光譜相機(jī)可能會(huì)受到非隨機(jī)誤差的影響[49],這會(huì)降低最終的圖像質(zhì)量。漸暈效應(yīng)指的是當(dāng)從其主點(diǎn)徑向偏離時(shí),圖像的亮度衰減的效果。這種現(xiàn)象是由相機(jī)鏡頭光圈的有效尺寸引起的,暈映效應(yīng)與鏡頭光圈尺寸成比例變化。此外,漸暈與焦距有關(guān),廣角鏡頭更受這種現(xiàn)象的影響。背景噪聲與漸暈效應(yīng)一般是在相機(jī)出廠時(shí)進(jìn)行了測(cè)試,相應(yīng)的誤差糾正系數(shù)寫在了相機(jī)里面,用戶數(shù)據(jù)處理時(shí),需要首先獲得這些糾正參數(shù),然后再對(duì)多光譜圖像進(jìn)行逐像素的糾正處理。針對(duì)每幅圖像進(jìn)行上述的糾正操作,得到一系列的經(jīng)過DN值修正的新圖像。
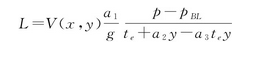
多光譜圖像的輻射校正一般采用替代輻射校正法(Vicarious radiometric calibration),這種方法是一種現(xiàn)場(chǎng)測(cè)量與校正方法。考慮到每個(gè)像素的DN值與傳感器探測(cè)到的輻射具有直接的關(guān)系,對(duì)于相機(jī)的每個(gè)光譜通道,可以建立相應(yīng)通道的DN值與輻射的關(guān)系模型。以RedEdge相機(jī)為例,輻射校正所建立的輻射傳輸模型為
(2)式中 p——歸一化的像素DN值
pBL——暗電流校準(zhǔn)值
a1、a2、a3——輻射校正因子
V(x,y)——漸暈校正多項(xiàng)式
te——曝光時(shí)間
g——傳感器增益
x、y——像素位置
L——輻射值,W/(m2·sr·nm)
該輻射模型將圖像的原始像素DN值轉(zhuǎn)換為絕對(duì)光譜輻射值。它補(bǔ)償了傳感器暗電流、傳感器的靈敏度、傳感器增益和曝光設(shè)置以及鏡頭暈影效應(yīng)。模型中使用的所有參數(shù)都可以從RedEdge像機(jī)保存的TIFF文件中的XMP元數(shù)據(jù)中讀取。
選入“少兒萬有經(jīng)典文庫(kù)”的原典在人類科學(xué)史上的重要性和經(jīng)典性不容置疑,但其厚重的篇幅和深邃的理論體系,讓一般讀者都可能望而卻步,更不要說理解能力有限的少年兒童。而在這套文庫(kù)里,少兒彩繪版呈現(xiàn)出生機(jī)勃勃的氣息,吸引著小讀者從容地走進(jìn)經(jīng)典。
利用同樣的輻射傳輸模型,構(gòu)建基于一個(gè)或者多個(gè)參考目標(biāo)的反射率與光譜輻射的經(jīng)驗(yàn)線模型,實(shí)現(xiàn)最終的輻射校正。DEL POZO等[48]分析了影響多光譜相機(jī)輸出值(DN)的因素,并且給出了詳細(xì)的基于標(biāo)準(zhǔn)地物的替代輻射校正方法,結(jié)果表明平均的輻射測(cè)量誤差在2.5%以內(nèi)。AHMED等[38]基于具有已知反照率值的參考目標(biāo)板,在每次飛行之前在地面上與成像的多光譜圖像進(jìn)行了輻射測(cè)量校準(zhǔn)[50],利用ASD地物光譜儀(ASD Inc., Boulder, CO, USA)在全天的多個(gè)光亮度不同時(shí)段測(cè)量標(biāo)準(zhǔn)目標(biāo)并獲得光譜反射率,使用經(jīng)驗(yàn)線校準(zhǔn)方法[51-52]來校準(zhǔn)多光譜影像的反射率數(shù)據(jù),研究中使用了橙色、紅色、白色和黑色防水油布和塑料片作為校準(zhǔn)目標(biāo)。采用類似的校準(zhǔn)方法,VON BUEREN等[53]比較了無人機(jī)多光譜相機(jī)(MCA6)與地面光譜儀在反射率測(cè)量方面的一致性,通過測(cè)量不同的地物目標(biāo)的反射率,得到其決定關(guān)系R2=0.92。高林等[43]為避免立地間獲得的ADC Lite多光譜數(shù)據(jù)的時(shí)間與天空條件的差異影響,采用偽不變地物輻射糾正法,通過地面目標(biāo)測(cè)得的反射率將多光譜圖像值轉(zhuǎn)換為圖像反射率?,F(xiàn)場(chǎng)的輻射校正方法需要均質(zhì)的朗伯表面,已有研究表明,選擇人造目標(biāo)要比使用偽不變特征(Pseudo-invariant features)更為有效[54]。
為了減少飛行中光線變化對(duì)反射率的影響,越來越多的多光譜相機(jī)開始配置一個(gè)向上的太陽光傳感器,同步記錄拍照時(shí)刻的入射環(huán)境光能量,用于更精確的輻射校準(zhǔn),隨著技術(shù)發(fā)展,有可能將目前依賴地面標(biāo)準(zhǔn)板的輻射校正流程大大簡(jiǎn)化。
2.3 專題圖生成
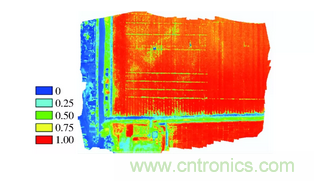
利用無人機(jī)多光譜影像數(shù)據(jù)可以生成植被指數(shù)、數(shù)字表面模型(DSM)等信息。圖6為歸一化植被指數(shù)NDVI圖像。圖7為數(shù)字表面模型DSM圖像。將這些信息與具體應(yīng)用建立關(guān)系,可以生成不同的應(yīng)用專題圖。
圖6 棉田歸一化植被指數(shù)(NDVI)圖(2017年,新疆維吾爾自治區(qū)石河子市)
圖7 多光譜相機(jī)拍攝生成的DSM圖像(2017年,寧夏回族自治區(qū)吳忠市)
3 小型無人機(jī)多光譜遙感應(yīng)用
低空無人機(jī)搭載不同的多光譜載荷獲取影像,在中小尺度高精度遙感監(jiān)測(cè)中優(yōu)勢(shì)明顯,尤其在農(nóng)業(yè)、林業(yè)、生態(tài)等領(lǐng)域的應(yīng)用比較廣泛。無人機(jī)多光譜系統(tǒng)能夠在一定程度上改變傳統(tǒng)地面人工測(cè)量或者調(diào)查效率低、時(shí)效性差及標(biāo)準(zhǔn)不統(tǒng)一等問題,可為具體應(yīng)用提供高效決策信息。
3.1 植被長(zhǎng)勢(shì)/營(yíng)養(yǎng)/脅迫監(jiān)測(cè)
不同植被其氮素、葉綠素、蛋白質(zhì)和細(xì)胞水分等含量各不相同,從而影響植被冠層群體的反射光譜,這為采用光譜遙感方法進(jìn)行植被生化組分反演提供了理論依據(jù)[55]。通過長(zhǎng)勢(shì)/營(yíng)養(yǎng)監(jiān)測(cè)可及時(shí)了解植被的生長(zhǎng)狀況、水肥病害脅迫及營(yíng)養(yǎng)狀況,便于及時(shí)采取各種管理措施, 從而保證植被的正常生長(zhǎng)并最大化減少對(duì)環(huán)境的破壞。
氮素是植被生長(zhǎng)的核心元素之一,對(duì)作物產(chǎn)量和生產(chǎn)利潤(rùn)影響巨大[55]。LU等[56]利用無人機(jī)搭載Mini MCA多光譜相機(jī)進(jìn)行了水稻氮素含量研究,利用紅邊植被指數(shù)(REDVI)實(shí)現(xiàn)了最優(yōu)的氮素估算結(jié)果,R2=0.87。BALLESTER等[57]利用無人機(jī)搭載RedEdge多光譜相機(jī)進(jìn)行了整個(gè)生長(zhǎng)季的棉花氮素時(shí)空分布研究,結(jié)果表明,在生長(zhǎng)的早期階段,對(duì)氮素含量進(jìn)行評(píng)價(jià)的最佳指標(biāo)為SCCCI(Simplified canopy chlorophyll content index)指數(shù),而到了生長(zhǎng)季的后期,最佳指標(biāo)是NDRE(Normalized difference red edge index)指數(shù)。葉綠素含量是植物生理生化及生態(tài)調(diào)查中最重要的量測(cè)參數(shù)之一,它不僅是植物營(yíng)養(yǎng)狀況、光合作用能力和發(fā)育階段的良好指示劑,也是評(píng)價(jià)植物健康的指標(biāo)之一。BERNI等[27]利用無人機(jī)搭載MCA 6多光譜相機(jī)獲取橄欖樹的多光譜影像,建立基于土壤調(diào)節(jié)植被指數(shù)的葉綠素預(yù)測(cè)模型,模型擬合決定系數(shù)R2=0.89。LU等[58]進(jìn)行了草地葉綠素含量的監(jiān)測(cè)研究。HERNNDEZ-CLEMENTE等[59]提出一個(gè)簡(jiǎn)單比值指數(shù)(R515/R570)并探討了利用無人機(jī)多光譜圖像繪制森林類胡蘿卜素含量圖以評(píng)估其生理狀況的可行性,研究采用的多光譜傳感器為MCA 6,并使用定制的濾光片實(shí)現(xiàn)多光譜分光,結(jié)果表明該指數(shù)在葉片及冠層尺度上都與森林的類胡蘿卜素顯著相關(guān)。肖宇釗[60]利用無人機(jī)模擬平臺(tái)搭載多光譜相機(jī)對(duì)油菜進(jìn)行低空遙感試驗(yàn),發(fā)現(xiàn)利用優(yōu)選植被指數(shù)建立線性的預(yù)測(cè)模型效果較好。PRIMICERIO等[61]利用無人機(jī)搭載ADC lite多光譜相機(jī)對(duì)葡萄園長(zhǎng)勢(shì)進(jìn)行了研究,結(jié)果表明根據(jù)歸一化差異植被指數(shù)生成的活力圖顯示了作物生長(zhǎng)的異質(zhì)性條件,與地面觀測(cè)結(jié)果基本吻合。秦占飛等[62]利用738、522 nm比值光譜指數(shù)RSI(Ratio spectral index)構(gòu)建線性模型對(duì)水稻葉片全氮含量進(jìn)行預(yù)測(cè),R2為0.673。ZARCO-TEJADA等[63]將無人機(jī)多光譜應(yīng)用于檢測(cè)水分脅迫引起的葉綠素?zé)晒獾淖兓?,配合氧氣吸收波段的窄帶濾光片獲取特征波段多光譜圖像,實(shí)現(xiàn)了冠層大尺度葉綠素?zé)晒獾某上駲z測(cè)。SUREZ等[64]將搭載MCA-6相機(jī)的無人機(jī)多光譜系統(tǒng)應(yīng)用于水分脅迫研究,結(jié)果表明長(zhǎng)時(shí)間序列的歸一化光化學(xué)反射PRI指數(shù)(PRI/PAR)與同期樹木受到的水分脅迫相匹配。
多元線性回歸、偏最小二乘和逐步線性回歸等建模方法在無人機(jī)遙感解析植被冠層氮素、葉綠素等生化組分信息時(shí)具有廣泛的應(yīng)用[65]。由于波段間反射率有著密切的關(guān)系,造成線性模型所需參數(shù)的重復(fù),因此目前研究者在遙感反演參數(shù)時(shí)轉(zhuǎn)向偏最小二乘法、主成分分析、人工神經(jīng)網(wǎng)絡(luò)和深度學(xué)習(xí)等方法,結(jié)合高光譜遙感信息,構(gòu)建包含更多波段的模型,以期更好的解釋模型預(yù)測(cè)的變異。植被長(zhǎng)勢(shì)及營(yíng)養(yǎng)監(jiān)測(cè)是目前無人機(jī)多光譜系統(tǒng)應(yīng)用最廣泛的領(lǐng)域,為精準(zhǔn)農(nóng)業(yè)中的作物管理及施肥決策提供了有力的數(shù)據(jù)采集工具,同時(shí),挑戰(zhàn)性在于不同作物類型、不同生長(zhǎng)時(shí)期的植被長(zhǎng)勢(shì)/營(yíng)養(yǎng)的預(yù)測(cè)模型存在普適性問題。
3.2 精細(xì)分類與地物識(shí)別
精確的土地分類與物種識(shí)別對(duì)資源管理、調(diào)查和運(yùn)營(yíng)非常重要[66]。已有研究在利用無人機(jī)多光譜數(shù)據(jù)開展森分制圖、樹木表型[67]、樹種識(shí)別[68]、雜草識(shí)別[69]、三維幾何特征提取[33]等方面都取得了一些成果。FASSNACHT等[70]對(duì)遙感在樹種識(shí)別方面的研究進(jìn)行了綜述,指出利用多光譜相機(jī)獲取的光譜、紋理及結(jié)構(gòu)信息及其組合可以用于樹種的識(shí)別。DIAZVARELA等[22]利用無人機(jī)多光譜相機(jī)獲取的光譜信息和DSM信息組合應(yīng)用于農(nóng)業(yè)梯田的識(shí)別,提出的識(shí)別方法的精度達(dá)到90%以上。MORA等[71]在北極苔原上應(yīng)用可見光和近紅外高分辨率無人機(jī)影像進(jìn)行識(shí)別研究,結(jié)果表明對(duì)苔原植被類型的識(shí)別精度達(dá)到84%,但是由于種間相似度高,物種個(gè)體小,因此無法區(qū)分物種。以校準(zhǔn)后的多光譜數(shù)據(jù)為數(shù)據(jù)源,以現(xiàn)場(chǎng)數(shù)據(jù)為驗(yàn)證樣本,AHMED等[38]應(yīng)用無人機(jī)搭載Parrot Sequoia多光譜相機(jī)對(duì)安大略省中部試驗(yàn)區(qū)的植被種類進(jìn)行了基于對(duì)象的分類準(zhǔn)確度評(píng)價(jià)研究,結(jié)果表明,針對(duì)5個(gè)土地覆蓋類型(森林、灌木、草本、裸土和建成區(qū)),分類精度高達(dá)95%,當(dāng)分析更詳細(xì)的植被物種類型(包括個(gè)體落葉樹種、灌木社區(qū)和農(nóng)作物)時(shí),多光譜數(shù)據(jù)的分類精度約為89%。GINI等[40]利用兩個(gè)相機(jī)組合(RGB和NIR)進(jìn)行基于無人機(jī)多光譜的樹種識(shí)別研究,結(jié)果表明采用監(jiān)督分類的物種分類精度為80%。LU等[72]將無人機(jī)多光譜引入草地物種組成的時(shí)空變化研究,結(jié)果表明,無人機(jī)獲得的多光譜影像具有較高的空間分辨率,是研究小尺度草地物種組成的不可比擬的數(shù)據(jù)源,總體準(zhǔn)確率約為85%。趙慶展等[73]以瑪納斯河畔為研究區(qū),使用固定翼無人機(jī)搭載Micro MCA12 Snap多光譜傳感器獲取高分辨率多光譜影像,提出將光譜特征、紋理特征信息與最佳波段指數(shù)結(jié)合的方法來確定地物分類最佳波段組合。LPEZ-GRANADOS等[74]利用無人機(jī)搭載MCA6多光譜相機(jī)實(shí)現(xiàn)了早期的雜草識(shí)別和精確制圖。TORRES-SNCHEZ等[33]將Tetracam MCA 6多光譜相機(jī)搭載到四軸旋翼無人機(jī)MD4-1000 (microdrones GmbH, Siegen, Germany)上,進(jìn)行高通量的樹木種植狀況調(diào)查,多光譜數(shù)據(jù)被應(yīng)用于構(gòu)建植被指數(shù)來實(shí)現(xiàn)圖像分類,區(qū)別土壤和植被,最終獲取單株樹高、冠幅等結(jié)構(gòu)信息。另外,研究發(fā)現(xiàn)飛行高度對(duì)最終的結(jié)果影響不大,因此可以采取較高的飛行高度以加快數(shù)據(jù)采集及處理流程。
1.2.2 提出循證問題 將系統(tǒng)收集的資料,通過科學(xué)分析,結(jié)合文獻(xiàn)資料,提出循證問題“如何對(duì)上消化道出血患者進(jìn)行健康教育”。
現(xiàn)有研究表明,分類方法主要分為面向?qū)ο蠛兔嫦蛳袼豙66]兩種,分類和地物識(shí)別精度與研究地的生境和植被類型密切相關(guān),生境越復(fù)雜,個(gè)體越小,種間相似度越高,識(shí)別精度越低[10]。相對(duì)于傳統(tǒng)的調(diào)查和監(jiān)測(cè)方法,無人機(jī)在可達(dá)性和抗干擾性方面表現(xiàn)優(yōu)越,可以安全高效地獲取地物分類數(shù)據(jù)。
3.3 病蟲害監(jiān)測(cè)與分析
病蟲害會(huì)造成巨大的生產(chǎn)損失,而早期診斷是降低損失的有效途徑。植被受到病蟲害脅迫后會(huì)導(dǎo)致葉片色素及冠層結(jié)構(gòu)的改變[75],特別是葉片葉綠素含量會(huì)發(fā)生改變,因此對(duì)葉綠素含量敏感的光譜特征可用于病蟲害遙感診斷中[76]。在植被病害方面,研究主要包括病害指數(shù)提取、病害識(shí)別、病害時(shí)空監(jiān)測(cè)等。劉良云等[77]與羅菊花等[78]利用多時(shí)相的高光譜航空?qǐng)D像對(duì)冬小麥條銹病進(jìn)行了監(jiān)測(cè),提取敏感波段建立病情指數(shù)對(duì)發(fā)病區(qū)域及程度進(jìn)行評(píng)價(jià),這些敏感波段可以用于指導(dǎo)病害監(jiān)測(cè)的波段選擇。NEBIKER等[24]利用Canon S110 NIR相機(jī)獲取NDVI指數(shù),對(duì)馬鈴薯和洋蔥栽培中的植物病害檢測(cè)進(jìn)行了定性研究,用于確定病害的原始侵染地點(diǎn)、病害的防治效果以及病害的發(fā)生模式等。YANG等[79]利用高分辨率多光譜和高光譜航空影像數(shù)據(jù)提取了棉花根腐病的發(fā)生范圍,結(jié)果顯示這兩類數(shù)據(jù)監(jiān)測(cè)結(jié)果的精度差別并不顯著,表明多光譜數(shù)據(jù)具有大范圍病害監(jiān)測(cè)的應(yīng)用潛力。CALDERN等[80]利用無人機(jī)搭載多光譜相機(jī)和熱紅外相機(jī)獲取橄欖樹圖像,診斷橄欖樹黃萎病,發(fā)現(xiàn)早期黃萎病與綠光波段相關(guān),隨著病情加重,葉綠素?zé)晒庵笖?shù)下降。
DASH等[81]利用無人機(jī)搭載RedEdge多光譜相機(jī)進(jìn)行病害爆發(fā)監(jiān)測(cè)研究,結(jié)果表明,無人機(jī)的多光譜圖像提供了一種有效的檢測(cè)方法來監(jiān)控森林疾病爆發(fā)所導(dǎo)致的葉片變色癥狀。在蟲害監(jiān)測(cè)方面,主要包括監(jiān)測(cè)方法研究、侵染目標(biāo)識(shí)別研究等。LEHMANN等 [44]利用無人機(jī)多光譜圖像和基于對(duì)象的圖像處理方法來監(jiān)測(cè)橡樹的蟲害。SAMSEEMOUNG等[82]應(yīng)用無人機(jī)多光譜系統(tǒng)識(shí)別油棕櫚樹的蟲害。ZHANG等[83]在對(duì)蟲害早期分級(jí)研究中采用了包括無人機(jī)高光譜在內(nèi)的多源數(shù)據(jù),利用高光譜數(shù)據(jù)提取植被指數(shù)進(jìn)而對(duì)葉綠素含量進(jìn)行反演,為多光譜在病蟲害預(yù)測(cè)及早期診斷的應(yīng)用提供了可能性。當(dāng)前植被病蟲害遙感診斷方法都主要集中在光譜特征的利用上,但是目前僅僅用遙感方法具有較大的局限性[76],如黃文江[84]指出多源遙感數(shù)據(jù)與氣象、病蟲害調(diào)查數(shù)據(jù)相結(jié)合是發(fā)展的方向之一。另外,病蟲害具有類型多樣、影響因素復(fù)雜、發(fā)生發(fā)展迅速等特點(diǎn),如果病害發(fā)生的熱點(diǎn)區(qū)域和關(guān)鍵時(shí)期不能迅速響應(yīng)將失去病害監(jiān)測(cè)與響應(yīng)的時(shí)機(jī)。遙感數(shù)據(jù)能夠提供面狀連續(xù)的數(shù)據(jù),結(jié)合關(guān)鍵地區(qū)無人機(jī)多光譜數(shù)據(jù),則能夠提供點(diǎn)狀的連續(xù)時(shí)相的數(shù)據(jù)[75],兩者點(diǎn)面結(jié)合、優(yōu)勢(shì)互補(bǔ)可以為病蟲害監(jiān)測(cè)提供更全面信息。
3.4 區(qū)域高精度葉面積指數(shù)提取
葉面積指數(shù)(LAI)指單位土地面積上植物葉片總面積占土地面積的比例,它是表征作物幾何結(jié)構(gòu)的關(guān)鍵生理物理參數(shù),與光合作用、蒸騰作用、碳循環(huán)等生物物理過程密切相關(guān)。LELONE等[23]將改造的多光譜相機(jī)搭載在電動(dòng)固定翼無人機(jī)上,對(duì)法國(guó)西南部小麥實(shí)驗(yàn)田進(jìn)行監(jiān)測(cè),基于獲取的可見光-近紅外波段的多光譜影像分析了植被指數(shù)(NDVI、GNDVI)與生物物理參數(shù)(LAI、氮吸收量)之間的聯(lián)系,相關(guān)系數(shù)達(dá)到0.82以上。采用類似的硬件方案,LU等[58]對(duì)草地的LAI提取進(jìn)行了研究。楊貴軍等[45]利用電動(dòng)六旋翼無人機(jī)搭載ADC Lite多光譜相機(jī)獲取了小麥的多光譜數(shù)據(jù),經(jīng)波段計(jì)算提取歸一化植被指數(shù)NDVI、土壤調(diào)節(jié)植被指數(shù) OSAVI、氮素反射指數(shù) NRI等與作物生長(zhǎng)狀態(tài)敏感的多種植被指數(shù),利用LAI-2000型葉面積指數(shù)儀獲取地面實(shí)測(cè)數(shù)據(jù),結(jié)果表明 NDVI 與作物 LAI 相關(guān)性最大,其模型驗(yàn)證R2為0.48,均方根誤差為0.27。高林等[43]以大豆為研究對(duì)象,分析了多源遙感數(shù)據(jù)對(duì)葉面積指數(shù)的估測(cè)精度,通過構(gòu)建植被指數(shù)與地面實(shí)測(cè)LAI數(shù)據(jù)的經(jīng)驗(yàn)回歸模型表明,針對(duì)星、機(jī)、地3類遙感信息源,地面高光譜數(shù)據(jù)在反演LAI方面較傳統(tǒng)多光譜數(shù)據(jù)有優(yōu)勢(shì)但不突出,在保證獲得高精度大豆LAI預(yù)測(cè)值和高工作效率的前提條件下,基于無人機(jī)遙感的多光譜獲取技術(shù)為最佳試驗(yàn)方案。KALISPERAKIS等[85]利用無人機(jī)高光譜相機(jī)提取的窄波段NDVI來反演葉面積指數(shù),其相關(guān)性為84%。TIAN等[86]利用無人機(jī)搭載RedEdge多光譜相機(jī)對(duì)紅樹林葉面積指數(shù)進(jìn)行了研究,提出了Scaled NDVI指數(shù)來預(yù)測(cè)植被指數(shù),其精度較高(R2=0.817),相比WorldView-2衛(wèi)星數(shù)據(jù)的反演結(jié)果,無人機(jī)多光譜數(shù)據(jù)可有效消除背景影響且分辨率更高,因此在長(zhǎng)勢(shì)均勻或者較低LAI的樣方里面應(yīng)用效果更好。BERNI等[27]利用MCA 6多光譜相機(jī)獲取橄欖樹的多光譜影像建立LAI預(yù)測(cè)模型,決定系數(shù)達(dá)到R2=0.88。
4)在一定的工程邊界條件及設(shè)計(jì)原則下,新方案飽和煙氣的加熱功率要比常規(guī)方案小10.511 6 MW,此部分熱量可用于預(yù)熱冷風(fēng),折算為機(jī)組增加的發(fā)電功率2.185 4 MW,新方案可利用的飽和煙氣余熱功率為10.570 4 MW,在考慮煙氣余熱用于凝結(jié)水系統(tǒng)和不考慮煙氣余熱用于凝結(jié)水系統(tǒng)兩種情況下,機(jī)組效率分別增加0.231%、0.164%,節(jié)能效果更好。
大量研究表明,背景和植被類型的影響是制約植被反演精度的2個(gè)關(guān)鍵因素[86-87]。現(xiàn)有基于無人機(jī)多光譜遙感提取作物葉面積指數(shù)的研究大都是通過植被指數(shù)與實(shí)測(cè)LAI建立經(jīng)驗(yàn)?zāi)P蛯?shí)現(xiàn),或者基于輻射傳輸模型和光譜數(shù)據(jù)[88]來建立機(jī)理模型實(shí)現(xiàn) 。其在研究對(duì)象的選擇上往往具有背景均勻、植被類型單一的特征。然而,大多數(shù)的復(fù)雜生態(tài)系統(tǒng)中,如沿海紅樹林,很可能是背景復(fù)雜,植被類型多樣,故葉面積指數(shù)提取的難度也較大。
3.5 區(qū)域高精度植被覆蓋度提取
植被覆蓋度(FVC)通常定義為統(tǒng)計(jì)范圍內(nèi)植被的垂直投影面積所占的百分比,它能夠直觀地反映植被的生長(zhǎng)狀況,是指示生態(tài)環(huán)境變化的重要指標(biāo)之一[89]。利用低空高分辨率實(shí)測(cè)數(shù)據(jù)作為樣本的實(shí)測(cè)數(shù)據(jù)源是植被覆蓋度遙感反演的發(fā)展趨勢(shì),多光譜相機(jī)提取的EVI或者NDVI指數(shù)等作為模型的輸入因子,取得了較好結(jié)果。劉峰等[13]利用汽油無人直升機(jī)搭載ADC Air多光譜相機(jī),對(duì)板栗覆蓋度進(jìn)行了研究,基于植被土壤光譜差異,提出了無人機(jī)多光譜植被覆蓋度的快速計(jì)算方法,進(jìn)而利用多時(shí)相的無人機(jī)多光譜遙感影像實(shí)現(xiàn)了植被覆蓋度年度變化監(jiān)測(cè)。李冰等[5]設(shè)計(jì)了一套以無人機(jī)為平臺(tái)的低空多光譜載荷觀測(cè)系統(tǒng),對(duì)冬小麥覆蓋度變化進(jìn)行監(jiān)測(cè)。周在明等[90]利用四旋翼無人機(jī)搭載ADC Air相機(jī)對(duì)灘涂濕地入侵物種互花米草的植被覆蓋度進(jìn)行了研究,通過NDVI指數(shù)模型獲取多光譜植被覆蓋度信息,以高精度可見光影像為真值進(jìn)行驗(yàn)證。結(jié)果表明NDVI模型估算值與真實(shí)值之間的決定系數(shù)為0.92,具有較好的一致性。相比目前廣泛應(yīng)用的無人機(jī)可見光圖像[91-92],利用無人機(jī)多光譜圖像反演植被覆蓋度時(shí)圖像的空間分辨率要求較低[90],CHAPMAN等[12]利用最優(yōu)線性無偏預(yù)測(cè)方法獲取的高粱植被覆蓋度與地面真實(shí)數(shù)據(jù)的決定系數(shù)為 0.88。
目前的研究中,主要是通過計(jì)算機(jī)視覺方法或植被指數(shù)建模反演等方法獲得作物的冠層覆蓋度信息。今后研究中還需要探索更普適性方法實(shí)現(xiàn)不同植被覆蓋度的準(zhǔn)確提取。
3.6 田塊尺度的作物估產(chǎn)
遙感估產(chǎn)是基于作物特有的波譜反射特征,利用遙感手段對(duì)作物產(chǎn)量進(jìn)行監(jiān)測(cè)預(yù)報(bào)的一種技術(shù)。利用影像的光譜信息可以反演作物的生長(zhǎng)信息,通過建立生長(zhǎng)信息與產(chǎn)量間的關(guān)聯(lián)模型,便可預(yù)估作物產(chǎn)量。在實(shí)際工作中,基于遙感手段構(gòu)建產(chǎn)量預(yù)測(cè)模型所使用的參數(shù)包括生育期長(zhǎng)度、葉綠素含量、葉面積指數(shù)、生物量、光譜反射率和植被指數(shù)等。
基于作物特有的波譜反射特征,通過構(gòu)建包含多種植被指數(shù)的遙感反演模型,可以實(shí)現(xiàn)作物產(chǎn)量的預(yù)測(cè)[93]。PEA-BARRAGN等[94]利用可見光相機(jī)結(jié)合紅外相機(jī)組成的機(jī)載多光譜采集系統(tǒng)研究了向日葵產(chǎn)量與作物多時(shí)間光譜數(shù)據(jù)之間的關(guān)系,發(fā)現(xiàn)利用早期生長(zhǎng)期采集的NDVI與產(chǎn)量之間的線性模型決定系數(shù)為0.6,另外,還發(fā)現(xiàn)不同太陽角度下獲取的多光譜圖像的NDVI變化不大,因此多光譜拍攝時(shí)刻不影響模型相關(guān)關(guān)系。ZARCOTEJADA等[95]也指出利用棉花早期的NDVI植被指數(shù)可以與產(chǎn)量建立很好關(guān)系。進(jìn)一步地,BALLESTER等[57]的研究表明早期的SCCCI和NDRE指數(shù)與皮棉產(chǎn)量具有顯著的線性回歸關(guān)系,而隨著氮素需求變大,氮素成為主要生長(zhǎng)限制因子時(shí),NDVI指數(shù)相比SCCCI和NDRE指數(shù)具有更好的產(chǎn)量預(yù)測(cè)精度。VEGA等[88]利用MD4-200型旋翼無人機(jī)(Microdrones GmbH’s VTOL UAV, Siegen, Germany)搭載3波段多光譜相機(jī)——ADC lite多光譜相機(jī)對(duì)經(jīng)過不同小區(qū)處理向日葵的產(chǎn)量預(yù)測(cè)進(jìn)行了研究,結(jié)果表明利用多光譜DN值計(jì)算的NDVI與產(chǎn)量也具有很好的線性關(guān)系。楊貴軍等[45]利用無人機(jī)多光譜影像計(jì)算得到 NDVI,結(jié)合氮肥優(yōu)化算法(Nitrogen fertilization optimization algorithm,NFOA)開展小麥潛在產(chǎn)量預(yù)測(cè)。NFOA 算法中通過定義當(dāng)季估產(chǎn)指數(shù)(In-season estimate of yield,INSEY)預(yù)測(cè)小麥潛在產(chǎn)量,該 INSEY指數(shù)由 NDVI 除以自播種之日起到測(cè)定冠層光譜期間(Grow degree days,GDD) 的天數(shù)得到。利用上述方法預(yù)測(cè)產(chǎn)量與小區(qū)實(shí)際產(chǎn)量進(jìn)行對(duì)比分析,其估算精度較高(R2=0.72)。DUAN等[96]的研究發(fā)現(xiàn),經(jīng)過地面覆蓋率調(diào)整后,開花期NDVI與小麥最終產(chǎn)量有較高的相關(guān)性,表明多源數(shù)據(jù)融合能更深入地反映作物的適應(yīng)機(jī)制。NEBIKER等[24]利用MultiSPEC 4C多光譜相機(jī)開展了油菜和大麥產(chǎn)量預(yù)測(cè),結(jié)果表明油菜所有小區(qū)品種的產(chǎn)量和NDVI值之間的相關(guān)性為78%,大麥產(chǎn)量與NDRE指數(shù)的相關(guān)性為87%。YU等[97]利用無人機(jī)多光譜進(jìn)行了大豆產(chǎn)量預(yù)測(cè)及成熟期識(shí)別研究,顯著提高了產(chǎn)量預(yù)測(cè)的精度(R=0.82),并且識(shí)別大豆成熟期的精度可以達(dá)到93%。ZHOU等[98]利用無人機(jī)搭載Mini-MCA多光譜相機(jī)預(yù)測(cè)谷物產(chǎn)量,提出孕穗期為最佳的預(yù)測(cè)時(shí)間,并且NDVI和VARI為最佳的預(yù)測(cè)指數(shù),同時(shí)多時(shí)相的植被指數(shù)與產(chǎn)量相關(guān)性更高。
從目前的文獻(xiàn)看,NDVI植被指數(shù)在產(chǎn)量預(yù)測(cè)中發(fā)揮著重要的作用。利用無人機(jī)多光譜系統(tǒng)獲取多光譜圖像來預(yù)測(cè)作物產(chǎn)量時(shí),具有成本低、天氣影響小、拍攝時(shí)間寬裕、對(duì)圖像分辨率不敏感的優(yōu)點(diǎn)。由于可以在合適的生育期對(duì)作物產(chǎn)量進(jìn)行預(yù)測(cè),可以在收獲前對(duì)某些問題進(jìn)行提前診斷,提前實(shí)施相應(yīng)的精準(zhǔn)農(nóng)業(yè)操作,從而獲得更好的經(jīng)濟(jì)及環(huán)境效益[88]。融合農(nóng)學(xué)知識(shí)、作物生長(zhǎng)模型與遙感指標(biāo)構(gòu)建精度高、通用性強(qiáng)的產(chǎn)量預(yù)測(cè)模型,對(duì)應(yīng)用無人機(jī)遙感進(jìn)行作物產(chǎn)量預(yù)測(cè)至關(guān)重要[99]。
3.7 生物量估算
生物量是指某一時(shí)刻單位面積內(nèi)實(shí)存生活的有機(jī)物質(zhì)(干重)總量。生物量是生態(tài)系統(tǒng)結(jié)構(gòu)優(yōu)劣和功能高低的最直接的表現(xiàn),是生態(tài)系統(tǒng)環(huán)境質(zhì)量的綜合體現(xiàn)。同時(shí),生物量的定量估算為碳循環(huán)研究提供了重要的參考。楊鵬萬等[100]利用藏北高寒草甸地上生物量和ADC便攜式多光譜相機(jī)數(shù)據(jù),建立了植被指數(shù)估算藏北高寒草甸地上生物量的模型。在分析了地上生物量與歸一化植被指數(shù)NDVI、歸一化綠波段差值植被指數(shù)GNDVI和土壤調(diào)節(jié)植被指數(shù)SAVI相關(guān)關(guān)系的基礎(chǔ)上,構(gòu)建了地上生物量和各植被指數(shù)的7種模型,并對(duì)擬合效果比較好的模型進(jìn)行了精度檢驗(yàn)。結(jié)果表明3個(gè)植被指數(shù)中NDVI的模擬效果最好, GNDVI最差;所有模型中,以NDVI為自變量的線性模型、以SAVI為自變量的線性模型和冪函數(shù)模型模擬和預(yù)測(cè)效果都很好。在VEGA等[88]對(duì)向日葵生物量的研究中,也表明利用多光譜相機(jī)的DN值計(jì)算的歸一化植被指數(shù)NDVI與生物量具有很好的線性關(guān)系。生物量是作物表型的一個(gè)重要參數(shù),AICH等[101]提出了一套基于深度學(xué)習(xí)的估算方法,并將無人機(jī)多光譜數(shù)據(jù)用于小麥生物量估算中,獲得較高的估算精度。
在今后的研究中將高精度的DSM數(shù)據(jù)與光譜數(shù)據(jù)相結(jié)合,利用獲取的植被結(jié)構(gòu)信息進(jìn)行輔助,有可能提高生物量估算的精度。
3.8 群落調(diào)查及生物多樣性評(píng)價(jià)
生物多樣性是一個(gè)描述自然界多樣性程度的內(nèi)容廣泛的概念,是生物及其環(huán)境形成的生態(tài)復(fù)合體以及與此相關(guān)的各種生態(tài)過程的綜合。BOON等[102]在南非利用固定翼無人機(jī)搭載RedEdge多光譜相機(jī)用于濕地植被完整性的調(diào)查和生態(tài)系統(tǒng)制圖,結(jié)果可以用于濕地?cái)_動(dòng)等級(jí)、面積的精確評(píng)價(jià)。MINAK等[42]將無人機(jī)多光譜遙感技術(shù)引入到森林干擾研究中,利用多光譜圖像提取植被指數(shù)來區(qū)分森林干擾類別。CHABOT等[25]應(yīng)用無人機(jī)多光譜監(jiān)測(cè)水生入侵植被,基于光譜特征的隨機(jī)森林方法的分類精度達(dá)到81%。LASSAU等[103]探索了利用航空多光譜數(shù)據(jù)獲得的歸一化差異植被指數(shù)NDVI和近紅外光譜中反射率的標(biāo)準(zhǔn)偏差stdevRNIR作為悉尼北部砂巖森林棲息地復(fù)雜度的指標(biāo),研究發(fā)現(xiàn)在NDVI植被指數(shù)和棲息地復(fù)雜度之間存在強(qiáng)烈相關(guān)關(guān)系。與定量研究相結(jié)合的遙感技術(shù)可預(yù)測(cè)動(dòng)物對(duì)景觀尺度的植被結(jié)構(gòu)和生物量的響應(yīng),并為特定棲息地的生物多樣性保護(hù)提供有效的管理手段。
盡管不能完全代替現(xiàn)場(chǎng)人工調(diào)查,無人機(jī)遙感系統(tǒng)可以在群落尺度上進(jìn)行生物多樣性評(píng)估,憑借其速度快、可到達(dá)性強(qiáng)的優(yōu)勢(shì)可以顯著提高群落調(diào)查的面積和效率,從而節(jié)約大量的人力物力。
3.9 高通量作物表型研究
植物表型是受基因和環(huán)境因素決定或影響的, 反映植物結(jié)構(gòu)及組成、植物生長(zhǎng)發(fā)育過程及結(jié)果的全部物理、生理、生化特征和性狀。作物表型信息是揭示作物生長(zhǎng)發(fā)育規(guī)律、環(huán)境與管理措施等關(guān)系的重要依據(jù)[104]。傳統(tǒng)的表型組學(xué)的研究技術(shù)和方法仍然停留在使用傳統(tǒng)的測(cè)量?jī)x器、數(shù)字圖像分析[105]等方法階段,田間試驗(yàn)取樣測(cè)定作物性狀參數(shù)的方法耗時(shí)耗力,且空間覆蓋有限,成為當(dāng)前農(nóng)學(xué)、育種等作物科學(xué)研究的發(fā)展瓶頸,而以無人機(jī)為代表的近地遙感高通量表型平臺(tái)憑借機(jī)動(dòng)靈活、成本低、空間覆蓋廣的優(yōu)勢(shì)成為獲取田間作物表型信息的重要手段[6,99]。
現(xiàn)有研究表明,無人機(jī)多光譜遙感系統(tǒng)中的可見光相機(jī)可以用于花期[106]、株高[107]、倒伏[108]、植被覆蓋度[12]等結(jié)構(gòu)與形態(tài)相關(guān)參數(shù)的獲取,而多光譜相機(jī)可以用于葉面積指數(shù)[43,109]、生物量[101]、產(chǎn)量[96]、出苗率[101]、返青率[110]、氮素含量[57]、葉綠素含量[111]等參數(shù)的獲取,紅外波段的相機(jī)可以用于冠層溫度[28]等脅迫指標(biāo)參數(shù)的獲取。具體地,WATANABE等[112]利用無人機(jī)多光譜系統(tǒng)進(jìn)行了高粱株高的測(cè)量,測(cè)量值輸入基因預(yù)測(cè)模型后,獲取的預(yù)測(cè)值與真實(shí)值的相關(guān)系數(shù)為0.84。DUAN等[96]利用無人機(jī)搭載RedEdge多光譜相機(jī),構(gòu)建了一套以測(cè)量地塊尺度NDVI指數(shù)為主的高通量作物表型平臺(tái),用于監(jiān)測(cè)小麥的農(nóng)學(xué)和育種特性,獲取的飛行數(shù)據(jù)與手持設(shè)備測(cè)量的地面NDVI數(shù)據(jù)具有高度的相關(guān)性,可以實(shí)現(xiàn)快速、有效的NDVI數(shù)據(jù)獲取,并且產(chǎn)量與NDVI的決定系數(shù)達(dá)到0.82。ZAMANALLAH等[55]利用固定翼無人機(jī)搭載ADC-lite多光譜相機(jī)用來研究玉米在缺氮脅迫/衰老下的長(zhǎng)勢(shì)空間變異特征,并利用無人機(jī)多光譜的NDVI數(shù)據(jù)進(jìn)行產(chǎn)量預(yù)測(cè)。GMEZ-CANDN等[28]提出了一種融合熱紅外(Thermoteknix Miricle)、多光譜相機(jī)(Sigma DP1x)的多波段的作物表型無人機(jī)遙感系統(tǒng),獲取的多時(shí)相的具有精確位置坐標(biāo)的正射紅外圖像可以用于單木尺度的樹木水分脅迫狀態(tài)判別。HAGHIGHATTALAB等[113]研究了無人機(jī)多光譜系統(tǒng)在獲取小麥育種小區(qū)植被指數(shù)方面的應(yīng)用,并對(duì)使用的兩種多光譜相機(jī)遙感系統(tǒng)進(jìn)行了比較,兩者獲取的植被指數(shù)與地面測(cè)量值具有較好的相關(guān)性。
高通量的作物表型平臺(tái)可應(yīng)用于農(nóng)學(xué)、植物生理和育種研究,用于探討基因、環(huán)境和管理措施之間復(fù)雜的相互作用。在未來的無人機(jī)遙感解析作物表型信息研究應(yīng)用中,需深入挖掘高光譜、LiDAR等傳感器信息,融合多傳感器的數(shù)據(jù)構(gòu)建通用性強(qiáng)、精度高的作物表型信息解析模型。
3.10 其他應(yīng)用
無人機(jī)多光譜遙感還可以提供一種快速、定量、高效的作物災(zāi)害損失評(píng)估方法,如ZHOU等[114]將無人機(jī)多光譜應(yīng)用于馬鈴薯冰雹災(zāi)害評(píng)估中,研究表明土壤調(diào)節(jié)植被指數(shù)對(duì)冰雹災(zāi)害最為敏感。此外,無人機(jī)多光譜遙感還應(yīng)用于自然遺產(chǎn)保護(hù)[115]、物候監(jiān)測(cè)[116]、灌溉設(shè)施識(shí)別[117]等研究中。
4 討論與建議
無人機(jī)多光譜遙感技術(shù)雖然近來年得到了廣泛的發(fā)展,但尚存在以下問題,需要在后續(xù)的無人機(jī)多光譜遙感中重點(diǎn)關(guān)注和解決,具體包括:
(1)無人機(jī)大面積作業(yè)續(xù)航時(shí)間受限問題。無人機(jī)航拍覆蓋范圍比地面測(cè)量廣,與衛(wèi)星資料的空間匹配度更高,無人機(jī)方法是對(duì)目前地面實(shí)測(cè)方法的巨大改進(jìn),可以高效、便捷地獲取更大空間范圍的地面觀測(cè)資料,從而克服傳統(tǒng)地表調(diào)查方法與衛(wèi)星數(shù)據(jù)的空間匹配性問題,提高遙感反演的精度[92]。但是,目前電動(dòng)無人機(jī)普遍存在航時(shí)較短的問題,一次路徑規(guī)劃無法實(shí)現(xiàn)大面積的信息獲取,并且對(duì)環(huán)境要求比較高,難以適應(yīng)復(fù)雜的地勢(shì)環(huán)境,通信信號(hào)易受干擾,因此,大區(qū)域的應(yīng)用還受到限制。
(2)無人機(jī)影像的幾何和輻射校正問題。目前大多數(shù)無人機(jī)多光譜影像分辨率較低,特征點(diǎn)匹配難度大,幾何校正效率和精度有待提高。多光譜傳感器在無人機(jī)飛行過程中受飛行穩(wěn)定性及光照環(huán)境變化影響,不同時(shí)刻采集的數(shù)據(jù)出現(xiàn)輻射非均一性,對(duì)圖像進(jìn)行輻射校正的方法一般為半手工方式,操作較為復(fù)雜。為此,后續(xù)應(yīng)用過程中必須研究針對(duì)所有數(shù)據(jù)的輻射校正算法,消除輻射非均一性對(duì)后續(xù)參量估算的影響。而且,目前的數(shù)據(jù)解析往往通過地面實(shí)測(cè)數(shù)據(jù)建立經(jīng)驗(yàn)回歸模型,模型受作物種植區(qū)域、作物類型以及作物生育期等影響較大,后續(xù)需利用多種作物觀測(cè)數(shù)據(jù)建立通用性模型,并保證模型解析精度滿足實(shí)際需求。建議在今后研究中,著重加強(qiáng)輻射校準(zhǔn)的研究,探索通用性輻射校準(zhǔn)方法,減少對(duì)地面定標(biāo)的需求,提供具有更加準(zhǔn)確輻射信息或者反射率信息的多光譜圖像,為提高后續(xù)應(yīng)用的精度奠定基礎(chǔ)。
(3)無人機(jī)多光譜載荷和傳感器波段受限問題。目前的多光譜相機(jī)具有波段數(shù)目有限(小于12),波段寬度比較寬(大于10 nm)的特點(diǎn),這導(dǎo)致不能準(zhǔn)確捕獲植被在某些敏感波段的精細(xì)反應(yīng),不能滿足精細(xì)分類或者探測(cè)的需要[40]。隨著技術(shù)發(fā)展,無人機(jī)高光譜傳感器在體積、重量上越來越小,數(shù)據(jù)傳輸及處理也逐漸成熟,有可能會(huì)更加普及[118]。本文中無人機(jī)載荷聚焦于小型的多光譜相機(jī),但是在面向具體的應(yīng)用時(shí),要根據(jù)需求提出最優(yōu)的載荷配置方案,微型高光譜儀[119]、成像高光譜儀[120]、紫外相機(jī)、熱紅外相機(jī)[29]等都具有各自獨(dú)特的優(yōu)勢(shì)及應(yīng)用價(jià)值。
(4)無人機(jī)多光譜遙感的尺度效應(yīng)問題。由于地表空間異質(zhì)性的普遍存在,任何非線性遙感模型反演產(chǎn)品都存在尺度效應(yīng)問題[43]。CURRAN等[121]研究了樣方大小對(duì)地表實(shí)測(cè)草地遙感反演結(jié)果的影響,證明樣方尺寸是影響測(cè)量精度的重要因素。因此在將無人機(jī)數(shù)據(jù)與衛(wèi)星數(shù)據(jù)、地面數(shù)據(jù)[122]建立模型時(shí),需要將尺度問題考慮在內(nèi)。建議各行業(yè)部門的專業(yè)人員與遙感、計(jì)算機(jī)科學(xué)等領(lǐng)域的專家密切合作,制訂無人機(jī)多光譜遙感技術(shù)的相關(guān)標(biāo)準(zhǔn)和規(guī)范,共同開發(fā)推進(jìn)并普及無人機(jī)多光譜遙感技術(shù)。
參考文獻(xiàn)
1 童慶禧, 田國(guó)良, 茅亞瀾. 多光譜遙感波段選擇方法的研究[J]. 宇航學(xué)報(bào), 1983, 4(2): 4-16.
2 王斌永, 舒嶸, 賈建軍,等. 無人機(jī)載小型多光譜成像儀的設(shè)計(jì)[J]. 光學(xué)與光電技術(shù), 2004,2(2):18-20.
WANG Binyong, SHU Rong, JIA Jianjun, et al. Design of compact multispectral imager for UAV[J]. Optics & Optoelectronic Technology, 2004,2(2): 18-20. (in Chinese)
3 廖小罕, 周成虎. 輕小型無人機(jī)遙感發(fā)展報(bào)告[M]. 北京: 科學(xué)出版社, 2016.
4 MARRIS, EMMA. Drones in science: fly, and bring me data [J]. Nature, 2013, 498(7453): 156.
5 李冰, 劉镕源, 劉素紅, 等. 基于低空無人機(jī)遙感的冬小麥覆蓋度變化監(jiān)測(cè) [J]. 農(nóng)業(yè)工程學(xué)報(bào), 2012, 28(13): 160-165.
LI Bing, LIU Rongyuan, LIU Suhong, et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the CSAE, 2012(13): 160-165. (in Chinese)
6 YANG G, LIU J, ZHAO C, et al. Unmanned aerial vehicle remote sensing for field-based crop phenotyping: current status and perspectives[J]. Frontiers in Plant Science, 2017, 8:1111.
7 SANKARAN S, KHOT L R, ESPINOZA C Z, et al. Low-altitude, high-resolution aerial imaging systems for row and field crop phenotyping: a review [J]. European Journal of Agronomy, 2015, 70:112-123.
8 ZHANG C, KOVACS J M. The application of small unmanned aerial systems for precision agriculture: a review [J]. Precision Agriculture, 2012, 13(6): 693-712.
9 楊海軍, 李營(yíng), 朱海濤, 等. 無人機(jī)遙感技術(shù)在環(huán)境保護(hù)領(lǐng)域的應(yīng)用 [J]. 高技術(shù)通訊, 2015, 25(6): 607-613.
YANG H J, LI Y, ZHU H T, et al.UAV remote sensing’s applications in the environmental protection field [J]. Chinese High Technology Letters, 2015, 25(6): 607-613. (in Chinese)
10 孫中宇, 陳燕喬, 楊龍, 等. 輕小型無人機(jī)低空遙感及其在生態(tài)學(xué)中的應(yīng)用進(jìn)展 [J]. 應(yīng)用生態(tài)學(xué)報(bào), 2017, 28(2): 528-536.
SUN Z Y, CHEN Y Q, YANG L, et al. Small unmanned aerial vehicles for low-altitude remote sensing and its application progress in ecology[J]. Chinese Journal of Applied Ecology, 2017, 28(2): 528-536. (in Chinese)
11 GAGO J, DOUTHE C, COOPMAN R E, et al. UAVs challenge to assess water stress for sustainable agriculture [J]. Agricultural Water Management, 2015, 153(Supp.C): 9-19.
12 CHAPMAN S C, CHAN A, JACKWAY P, et al. Pheno-copter: a low-altitude, autonomous remote-sensing robotic helicopter for high-throughput field-based phenotyping [J]. Agronomy, 2014, 4(2): 279-301.
13 劉峰, 劉素紅, 向陽. 園地植被覆蓋度的無人機(jī)遙感監(jiān)測(cè)研究 [J/OL]. 農(nóng)業(yè)機(jī)械學(xué)報(bào), 2014, 45(11): 250-257.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20141139&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.11.039.
LIU Feng,LIU Suhong,XIANG Yang.Study on monitoring fractional vegetation cover of garden plots by unmanned aerial vehicles[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2014,45(11):250-257. (in Chinese)
14 LINK J, SENNER D, CLAUPEIN W. Developing and evaluating an aerial sensor platform (ASP) to collect multispectral data for deriving management decisions in precision farming [J]. Computers & Electronics in Agriculture, 2013, 94(11): 20-28.
推薦閱讀:


