

【導(dǎo)讀】分析了上橋臂PWM 調(diào)制、下橋臂恒通調(diào)制方式時(shí)的端電壓波形,討論相應(yīng)的反電動(dòng)勢過零點(diǎn)檢測方法。在PWM 調(diào)制信號(hào)開通狀態(tài)結(jié)束時(shí)刻對(duì)端電壓進(jìn)行采樣,由軟件算法確定反電動(dòng)勢過零點(diǎn). 針對(duì)電機(jī)運(yùn)行時(shí)存在超前換相或滯后換相的情況,通過設(shè)置合理的延遲時(shí)間來實(shí)現(xiàn)最佳換相。
摘要
分析了上橋臂PWM 調(diào)制、下橋臂恒通調(diào)制方式時(shí)的端電壓波形,討論相應(yīng)的反電動(dòng)勢過零點(diǎn)檢測方法. 在PWM 調(diào)制信號(hào)開通狀態(tài)結(jié)束時(shí)刻對(duì)端電壓進(jìn)行采樣,由軟件算法確定反電動(dòng)勢過零點(diǎn). 針對(duì)電機(jī)運(yùn)行時(shí)存在超前換相或滯后換相的情況,通過設(shè)置合理的延遲時(shí)間來實(shí)現(xiàn)最佳換相. 針對(duì)實(shí)際電機(jī)存在反電動(dòng)勢過零點(diǎn)分布不均勻的情況,根據(jù)過零點(diǎn)間隔時(shí)間存在著周期性規(guī)律,提出一種新的延遲時(shí)間設(shè)置方法,使換相點(diǎn)位于相鄰過零點(diǎn)的中間位置,實(shí)現(xiàn)了電機(jī)的準(zhǔn)確換相. 實(shí)驗(yàn)驗(yàn)證了所提出方法的可行性和有效性.
無刷直流電機(jī)(BLDCM )具有結(jié)構(gòu)簡單、運(yùn)行效率高和調(diào)速性能好等優(yōu)點(diǎn),在工業(yè)和商業(yè)領(lǐng)域得到廣泛應(yīng)用. 近年來, 無刷直流電機(jī)的無位置傳感器控制一直是國內(nèi)外的研究熱點(diǎn),較為常見的轉(zhuǎn)子位置信號(hào)檢測方法有反電動(dòng)勢法、定子電感法、續(xù)流二極管法、磁鏈估計(jì)法和狀態(tài)觀測器法等,其中反電動(dòng)勢法最為有效實(shí)用.
速時(shí), 分別在PWM 關(guān)斷和開通階段檢測反電動(dòng)勢,采用2個(gè)不同的參考電壓獲得反電動(dòng)勢過零點(diǎn),而不需位置傳感器和電流傳感器,但增加了硬件電路的復(fù)雜性. 文獻(xiàn)通過比較懸空相繞組端電壓和逆變器直流環(huán)中點(diǎn)電壓的關(guān)系,獲得反電動(dòng)勢過零點(diǎn). 該方法無需重構(gòu)電機(jī)中性點(diǎn), 不使用濾波電路,但需采用硬件電路比較得到過零點(diǎn).
提出了在on _pwm 調(diào)制方式時(shí)的反電動(dòng)勢過零點(diǎn)檢測方法,采用內(nèi)置AD 的微控制器在PWM開通時(shí)檢測懸空相端電壓,軟件算法中使用簡單的代數(shù)運(yùn)算,獲得準(zhǔn)確的過零點(diǎn)信號(hào). 目前,關(guān)于反電動(dòng)勢法的研究多集中在反電動(dòng)勢過零點(diǎn)的檢測電路方法和由濾液電路引起的相位誤差的消除或補(bǔ)償方法,但在準(zhǔn)確換相方面的研究尚不夠深入.
直接反電動(dòng)勢法原理
無刷直流電機(jī)一般采用“兩相導(dǎo)通三相六狀態(tài)”運(yùn)行方式, 每個(gè)工作狀態(tài)只有兩相繞組導(dǎo)通,第三相繞組處于懸空狀態(tài),被用來檢測反電勢過零點(diǎn). 在檢測到反電動(dòng)勢過零點(diǎn)后, 根據(jù)換相點(diǎn)滯后過零點(diǎn)30°電角度, 設(shè)置對(duì)應(yīng)的延遲時(shí)間. 當(dāng)延遲時(shí)間到達(dá)后,電機(jī)換相進(jìn)入下一個(gè)工作狀態(tài).
本文采用基于端電壓的直接反電動(dòng)勢檢測電路,通過檢測懸空相繞組的端電壓信號(hào)來獲得反電動(dòng)勢過零點(diǎn). 采用分壓電阻對(duì)端電壓和直流側(cè)電壓進(jìn)行同比例分壓,使分壓后的被測信號(hào)落在采樣單元允許的輸入范圍內(nèi). 圖1 ( a)為主電路和直接反電勢法分壓電路,端電壓UA , UB , UC 和UDC經(jīng)過分壓后分別為Ua , Ub , Uc 和Udc.
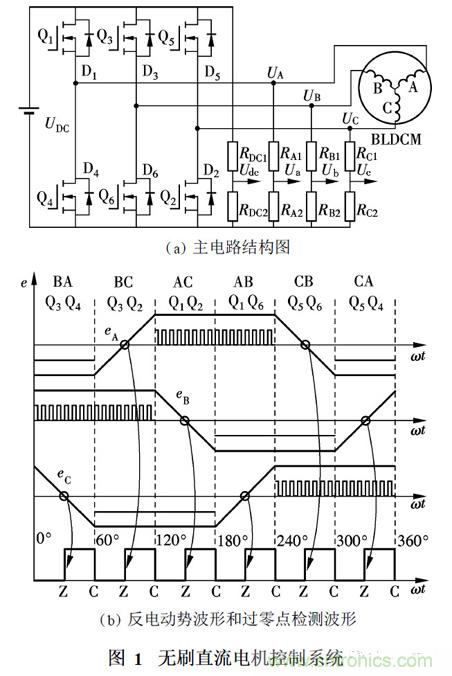
理想的反電動(dòng)勢波形為正負(fù)交變的梯形波,且以電機(jī)中心點(diǎn)為參考點(diǎn),圖1 ( b)中, eA , eB , eC 分別表示三相反電動(dòng)勢. 電機(jī)在一個(gè)周期內(nèi)共有6個(gè)工作狀態(tài),每隔60°電角度工作狀態(tài)改變一次, 每個(gè)功率開關(guān)導(dǎo)通120°電角度. 工作狀態(tài)可以由導(dǎo)通的兩相繞組和2個(gè)功率開關(guān)表示,如圖1 ( b)所示,BA 表示電流從B 相繞組流入,從A 相繞組流出;Q3Q4 表示B 相上橋臂和A 相下橋臂的2個(gè)功率開關(guān)導(dǎo)通. 過零點(diǎn)檢測波形表示反電動(dòng)勢過零點(diǎn)和換相點(diǎn), 其中, Z為反電動(dòng)勢過零點(diǎn), C 為換相點(diǎn).反電勢過零點(diǎn)和換相點(diǎn)均勻分布,彼此間隔30°電角度.
反電動(dòng)勢過零點(diǎn)檢測方法
無刷直流電機(jī)控制可以采用多種PWM 調(diào)制方式. 采用的調(diào)制方式不同, 呈現(xiàn)的端電壓波形也不同. 本文采用上橋臂PWM 調(diào)制,下橋臂恒通(H _pwm 2L _on )的調(diào)制方式. 以A 相為例, 假設(shè)PWM 占空比為50% ,忽略高頻開關(guān)噪聲和換相續(xù)流產(chǎn)生的脈沖毛刺,理想的端電壓波形如圖2 ( a)所示. 在一個(gè)周期范圍內(nèi),將A 相端電壓波形劃分為BA, BC, AC, AB, CB 和CA 六個(gè)區(qū)域,每個(gè)區(qū)域?qū)?yīng)一個(gè)工作狀態(tài). 端電壓波形的上升部分和下降部分為BC區(qū)和CB 區(qū),此時(shí)A 相處于懸空狀態(tài).

BA 和CA 區(qū)為A 相下橋臂開關(guān)導(dǎo)通階段, Q4處于恒通狀態(tài), A 相繞組與直流側(cè)電壓的負(fù)極相連,端電壓被鉗制到直流側(cè)電壓的負(fù)極電位. 由于直流側(cè)電壓的負(fù)極為端電壓的參考點(diǎn),此時(shí)端電壓為零.
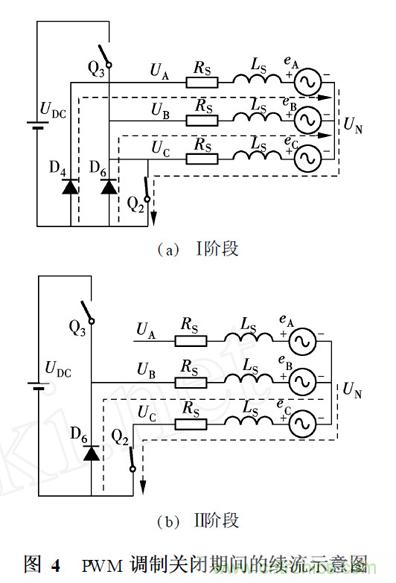
AC 和AB 區(qū)為A 相上橋臂開關(guān)PWM 調(diào)制階段. 以AC區(qū)為例,在PWM 開通期間, Q1 和Q2 導(dǎo)通, A 相繞組與直流側(cè)電壓的正極相連, 端電壓為UDC ;在PWM 關(guān)閉期間, Q1 關(guān)閉, Q2 導(dǎo)通,由于繞組阻抗呈感性, A 相下橋臂的反并聯(lián)二極管D4 導(dǎo)通續(xù)流,此時(shí)A 相繞組與直流側(cè)電壓的負(fù)極相連,端電壓為零.
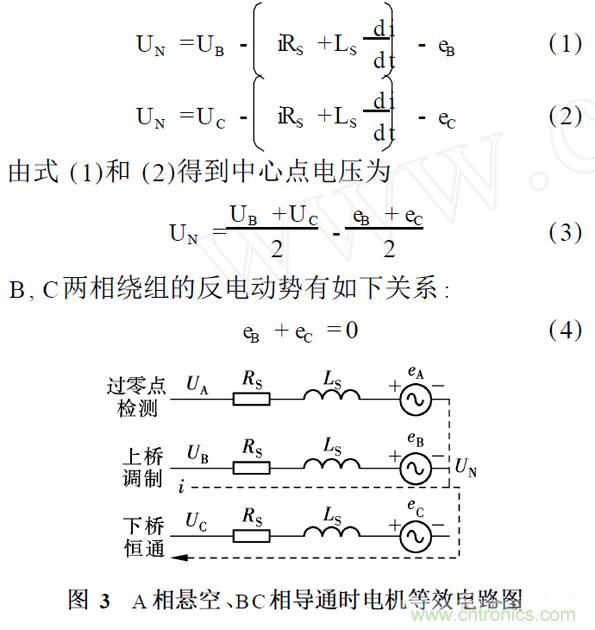
BC和CB 區(qū)為A 相懸空階段,將2個(gè)區(qū)域各自分為Ⅰ和Ⅱ兩個(gè)時(shí)段,如圖2 ( b)所示. 以BC 區(qū)為例,此時(shí)電流從B 相繞組流進(jìn), C 相繞組流出,如圖3所示. 圖中, RS 和LS 分別表示定子繞組的等效電阻和電感, UN 為電機(jī)中心點(diǎn)電壓, i為相電流. 忽略功率開關(guān)和二極管的正向?qū)▔航? 根據(jù)基爾霍夫電壓定律可得

本文在PWM 調(diào)制開通狀態(tài)結(jié)束時(shí)刻對(duì)懸空相的端電壓進(jìn)行采樣. 由于硬件電路存在延時(shí)效應(yīng),采樣時(shí)功率開關(guān)尚未關(guān)斷, 相當(dāng)于在PWM 調(diào)制開通期間采樣,此時(shí)被采樣的電壓信號(hào)受開關(guān)噪聲影響較小. 根據(jù)式( 5) , 當(dāng)檢測到A 相端電壓值為直流電壓值的一半時(shí), A 相反電動(dòng)勢過零, UA 和UDC /2的比較就相當(dāng)于eA 和0的比較.
反電動(dòng)勢過零點(diǎn)檢測方法簡單準(zhǔn)確,使用軟件算法判斷反電勢過零點(diǎn). 硬件電路只要選擇阻值和功率都合適的電阻用于分壓,不需要重構(gòu)電機(jī)中心點(diǎn),也不需要低通濾波器,信號(hào)沒有相位延時(shí),也不采用比較器來檢測過零點(diǎn). 硬件電路結(jié)構(gòu)簡單, 適合低成本應(yīng)用.
延遲時(shí)間設(shè)置方法
最佳換相邏輯是指繞組在梯形波反電勢的平頂部分導(dǎo)通, 與之對(duì)應(yīng)的最佳換相位置是指在換相完成后,定子磁勢超前轉(zhuǎn)子磁勢120°電角度,如圖5所示. 其中, Fa 和Fr 分別表示定子磁勢和轉(zhuǎn)子磁勢. 在一個(gè)工作狀態(tài)內(nèi)定子磁勢平均超前轉(zhuǎn)子磁勢90°電角度,平均電磁轉(zhuǎn)矩最大.
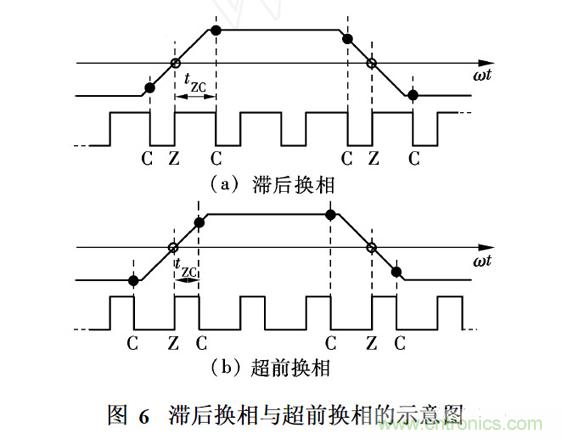
若在換相時(shí)刻轉(zhuǎn)子已經(jīng)轉(zhuǎn)過最佳換相位置,則表現(xiàn)為滯后換相,換相點(diǎn)在時(shí)間軸上相對(duì)最佳換相位置右移,端電壓波形不對(duì)稱, 右側(cè)的部分波形被湮沒,過零點(diǎn)到換相點(diǎn)的延遲時(shí)間tZC偏大,如圖6所示. 滯后換相時(shí), 轉(zhuǎn)子超過最佳換相位置的角度應(yīng)小于30°電角度, 若換相嚴(yán)重滯后, 下次過零點(diǎn)將被湮沒而檢測不到,引起電機(jī)失步. 反之,若轉(zhuǎn)子還沒有到達(dá)最佳換相位置就換相,則為超前換相,換相點(diǎn)在時(shí)間軸上相對(duì)最佳換相位置左移,端電壓的部分左側(cè)波形被湮沒,過零點(diǎn)到換相點(diǎn)的延遲時(shí)間tZC偏小. 滯后換相和超前換相都會(huì)引起電機(jī)電磁轉(zhuǎn)矩波動(dòng),轉(zhuǎn)子運(yùn)轉(zhuǎn)不平穩(wěn). 實(shí)測的端電壓波形(通道1)如圖7所示,通道2為過零點(diǎn)檢測波形,上升沿與下降沿分別對(duì)應(yīng)過零點(diǎn)與換相點(diǎn).

根據(jù)過零點(diǎn)超前換相點(diǎn)30°電角度的原理,在檢測到過零點(diǎn)后,設(shè)置延遲時(shí)間tZC確定換相點(diǎn). 理想運(yùn)行狀態(tài)下,過零點(diǎn)與換相點(diǎn)等間隔分布,彼此相差30°電角度. 因此, 可根據(jù)過零點(diǎn)的間隔時(shí)間來設(shè)置延遲時(shí)間,傳統(tǒng)的延遲時(shí)間設(shè)置方法是將延遲時(shí)間設(shè)置為上次過零點(diǎn)到本次過零點(diǎn)時(shí)間的一半,如圖8所示. 圖中, Z ( k) , C ( k)分別表示第k次過零點(diǎn)和第k次換相點(diǎn),當(dāng)檢測到第k次過零點(diǎn)時(shí),延遲時(shí)間如下設(shè)置:

式中, TZZ ( k - 1)為第k - 1次過零點(diǎn)到第k次過零點(diǎn)的時(shí)間; tZC ( k)為第k次過零點(diǎn)到第k次換相點(diǎn)的延遲時(shí)間.
將設(shè)置好的延遲時(shí)間載入寄存器,計(jì)數(shù)器開始計(jì)時(shí). 到達(dá)預(yù)設(shè)的延遲時(shí)間后,電機(jī)換相進(jìn)入下一個(gè)工作狀態(tài),定子磁勢步進(jìn)一次. 換相點(diǎn)位于相鄰過零點(diǎn)的中間位置,電機(jī)在最佳換相位置換相,平均電磁轉(zhuǎn)矩最大,端電壓波形呈對(duì)稱狀態(tài). 當(dāng)反電動(dòng)勢過零點(diǎn)分布均勻時(shí),傳統(tǒng)的延遲時(shí)間設(shè)置方法能較好地實(shí)現(xiàn)無刷直流電機(jī)的無位置傳感器控制.
新的延遲時(shí)間設(shè)置方法
反電動(dòng)勢法重在檢測反電動(dòng)勢波形上升和下降部分的2個(gè)過零點(diǎn),波形平頂部分對(duì)過零點(diǎn)檢測方法影響不大. 由于電機(jī)制造工藝等方面的影響,實(shí)際的無刷直流電機(jī)存在三相繞組并不完全對(duì)稱的情況,導(dǎo)致三相反電動(dòng)勢之間存在差異, 相鄰過零點(diǎn)的間隔時(shí)間不完全相等, 過零點(diǎn)分布并不均勻.、
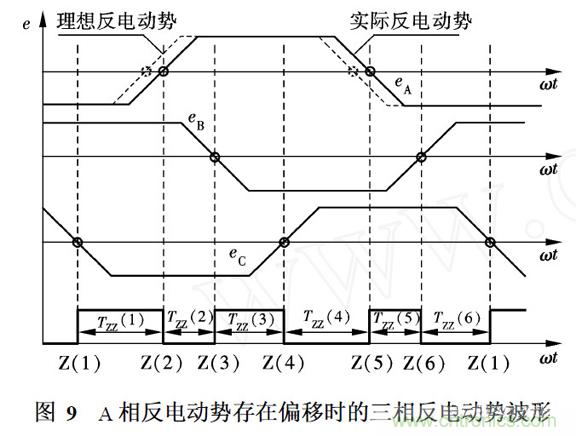
假設(shè)A 相反電動(dòng)勢存在相位偏移, 波形上升和下降部分上的過零點(diǎn)滯后出現(xiàn),導(dǎo)致過零點(diǎn)在時(shí)間軸上分布不均勻. 如圖9所示, 虛線表示理想反電動(dòng)勢,實(shí)線表示存在相位偏移的實(shí)際反電動(dòng)勢,過零點(diǎn)的間隔時(shí)間TZZ (1) , TZZ ( 2)和TZZ ( 3)不相等. 每相反電動(dòng)勢波形上升和下降部分的2個(gè)過零點(diǎn)相差180°電角度, 過零點(diǎn)間隔時(shí)間存在著周期性規(guī)律,如TZZ ( 1) =TZZ ( 4) , TZZ ( 2) = TZZ ( 5)和TZZ (3) = TZZ (6) .
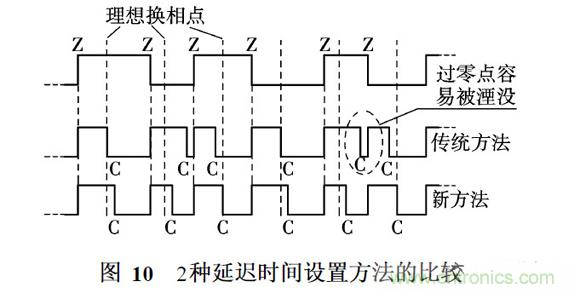
采用傳統(tǒng)的延遲時(shí)間設(shè)置方法,某些換相點(diǎn)偏離理想換相點(diǎn)較大. 當(dāng)某次換相嚴(yán)重滯后時(shí),下次過零點(diǎn)容易被湮沒,導(dǎo)致電機(jī)失步,如圖10所示.
為使換相點(diǎn)位于相鄰2個(gè)過零點(diǎn)的中間位置,本文提出一種新的延遲時(shí)間設(shè)置方法. 如圖11所示,過零點(diǎn)的間隔時(shí)間TZZ ( k - 3)和TZZ ( k)相等,當(dāng)檢測到第k次過零點(diǎn)時(shí),從第k次過零點(diǎn)到第k次換相點(diǎn)的延遲時(shí)間tZC ( k)如下設(shè)置:

式中, TZZ ( k - 3)為第k - 3次過零點(diǎn)到第k - 2次過零點(diǎn)的時(shí)間.
當(dāng)三相反電動(dòng)勢波形的間隔時(shí)間長度不是理圖11 新的延遲時(shí)間設(shè)置方法想的120°電角度,過零點(diǎn)間隔時(shí)間不相等時(shí),采用新的延遲時(shí)間設(shè)置方法可以使換相更為準(zhǔn)確,換相點(diǎn)落在前后2個(gè)過零點(diǎn)的中間位置,過零點(diǎn)不容易被湮沒,電機(jī)運(yùn)行不易失步,如圖10所示. 特別是在電機(jī)高速運(yùn)行時(shí),新方法提高了電機(jī)運(yùn)行的可靠性,實(shí)驗(yàn)很好地驗(yàn)證了新方法的可行性和有效性.
2種延遲時(shí)間設(shè)置方法對(duì)應(yīng)的實(shí)測端電壓波形(通道1)如圖12所示,通道2和通道3為過零點(diǎn)檢測波形,通道2的上升沿和下降沿對(duì)應(yīng)于過零點(diǎn),而通道3的上升沿和下降沿分別對(duì)應(yīng)過零點(diǎn)和換相點(diǎn).
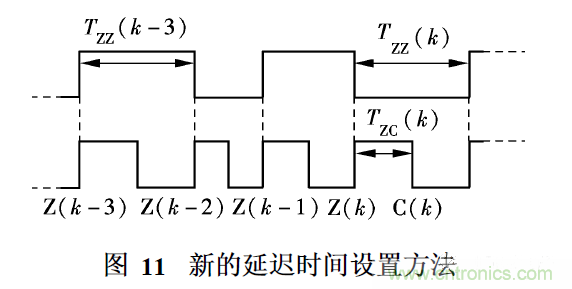
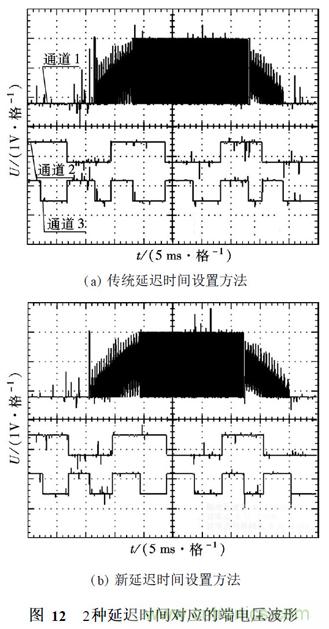
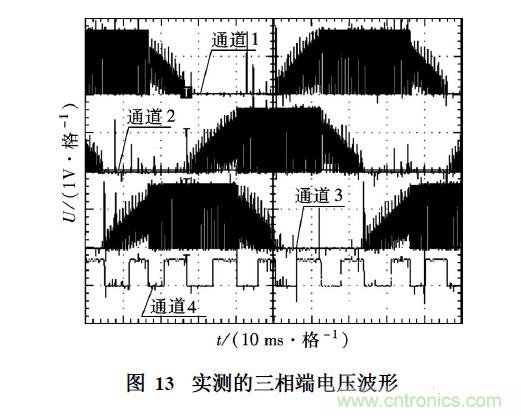
圖13為實(shí)測的三相端電壓波形(通道1~通道3) ,通道4的上升沿和下降沿分別對(duì)應(yīng)過零點(diǎn)和換相點(diǎn).
結(jié)論
1) 反電動(dòng)勢法通過檢測端電壓獲得反電動(dòng)勢過零點(diǎn),設(shè)置延遲時(shí)間得到換相點(diǎn). 本文采用軟件算法獲得過零點(diǎn)和換相點(diǎn), 簡化了硬件電路, 適用于低成本應(yīng)用.
2) 超前換相或滯后換相都會(huì)導(dǎo)致電機(jī)運(yùn)行不平穩(wěn),端電壓兩側(cè)波形不對(duì)稱, 通過設(shè)置合理的延遲時(shí)間,可使電機(jī)在最佳換相位置換相.
3) 當(dāng)反電動(dòng)勢過零點(diǎn)分布均勻時(shí), 可采用傳統(tǒng)的延遲時(shí)間設(shè)置方法,即將延遲時(shí)間設(shè)置為上次過零點(diǎn)到本次過零點(diǎn)時(shí)間的一半.
4) 當(dāng)實(shí)際電機(jī)的反電動(dòng)勢過零點(diǎn)分布不均勻,可使第k次過零點(diǎn)到第k次換相點(diǎn)的延遲時(shí)間等于第k - 3次過零點(diǎn)到第k - 2次過零點(diǎn)時(shí)間的一半,這一新的延遲時(shí)間設(shè)置方法,使換相點(diǎn)位于相鄰2個(gè)過零點(diǎn)的中間位置,實(shí)現(xiàn)了電機(jī)的準(zhǔn)確換相. 實(shí)驗(yàn)很好地驗(yàn)證了該新方法的可行性和有效性.


