

【導讀】本文介紹的是FPGA在多軸步進電機控制器中的應(yīng)用,此系統(tǒng)可對多軸步進電機實現(xiàn)高精確度控制,每軸的運動是相互獨立的,并且控制參數(shù)在線可編程。
提出一種應(yīng)用現(xiàn)場可編程門陣列(FPGA)實現(xiàn)多軸步進電機控制器的方法。采用IP設(shè)計思想,步進電機的運動控制由硬件電路(步進電機IP核)實現(xiàn),軌跡計算由同一芯片上的微處理器(Nios II軟核)實現(xiàn),從而可以構(gòu)建多軸步進電機控制器的可編程片上系統(tǒng)(SoPC系統(tǒng))。利用VHDL硬件描述語言,設(shè)計了一種高性能步進電機IP核,并進行了仿真驗證。為了驗證該IP核的復用性,構(gòu)建了一個4軸步進電機控制器的SoPC系統(tǒng)。實驗結(jié)果表明,此系統(tǒng)可對多軸步進電機實現(xiàn)高精確度控制,每軸的運動是相互獨立的,并且控制參數(shù)在線可編程?;谶@種方式構(gòu)建的系統(tǒng),擴展方便、可移植性高、具有廣泛的適用性,可用于多軸伺服系統(tǒng)的工業(yè)領(lǐng)域。
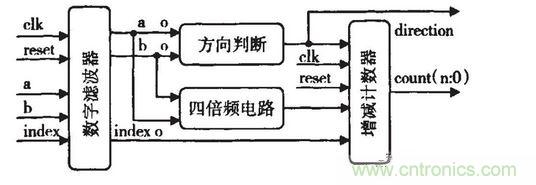
QEP電路框圖



