
【導(dǎo)讀】在整個測試過程中,無人機(jī)要先識別用戶的身份和面部表情,并制作一個“觸發(fā)”臉來控制無人機(jī),用戶也要事先設(shè)定其飛行軌跡和飛行強(qiáng)度。之后,用戶就可以刷臉來控制無人機(jī)進(jìn)行飛行。對于用戶來說,這將是一個非常直觀自然的體驗(yàn)。
據(jù)IEEE Spectrum報(bào)道,加拿大西蒙弗雷澤大學(xué)的機(jī)器人專家Jake Bruce、Jacob Perron和Richard Vaughan展示了他們最新發(fā)明的不需要經(jīng)驗(yàn)和控制器就可以控制無人機(jī)的系統(tǒng)。甚至都不需要使用雙手,只要在無人機(jī)上做個鬼臉,就可以控制它。
在整個測試過程中,無人機(jī)要先識別用戶的身份和面部表情,并制作一個“觸發(fā)”臉來控制無人機(jī),用戶也要事先設(shè)定其飛行軌跡和飛行強(qiáng)度。之后,用戶就可以刷臉來控制無人機(jī)進(jìn)行飛行。對于用戶來說,這將是一個非常直觀自然的體驗(yàn)。
以下詳細(xì)的介紹了該如何使用人臉來控制無人機(jī):

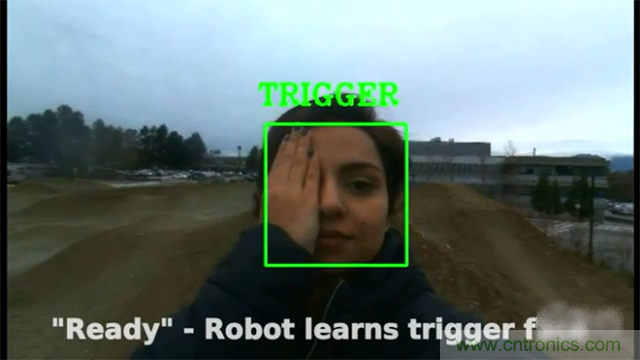
在準(zhǔn)備階段中,無人機(jī)要先識別用戶的身份和面部表情,并通過觸摸交互的方式將其輸入程序中。用戶把無人機(jī)放置在眼睛的高度上,面無表情的注視著它的鏡頭,直到其完成識別為止。不到一分鐘就能夠完成這一過程,除非用戶笑出聲。然后旋轉(zhuǎn)無人機(jī),使其側(cè)放。制作一個能夠“觸發(fā)”無人機(jī)的面部。這里不需要用戶面無表情,甚至用戶只露出半張臉都可以。
確定飛行目標(biāo)階段中,無人機(jī)會以用戶為中心進(jìn)行飛行,而用戶將設(shè)定無人機(jī)飛行軌跡并選擇其飛行強(qiáng)度,就像發(fā)射彈弓的強(qiáng)度一樣。
將無人機(jī)放在用戶面前的地面上,它會開始起飛。剛開始它可能不受控制,在用戶視線內(nèi)也會出現(xiàn)偏航情況。一旦發(fā)現(xiàn)其偏航,用戶就要慢慢的后退。在這種情況下,可以想象出用戶和無人機(jī)之間就像有一根橡皮筋一樣,越拉越緊。

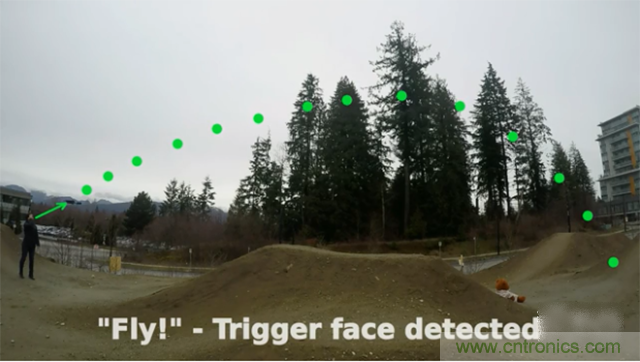
在飛行階段中,用戶向無人機(jī)發(fā)出信號后,它將按照在目標(biāo)階段結(jié)束時觀察到的參數(shù)軌跡進(jìn)行飛行。當(dāng)無人機(jī)面向用戶的反方向,并且距離用戶足夠遠(yuǎn)時,用戶可以使用“觸發(fā)”臉啟動無人機(jī)飛行,它將立即向后飛行遠(yuǎn)離用戶。其飛行強(qiáng)度則是由用戶與無人機(jī)之間的距離決定的,其原理就像發(fā)射彈弓一樣。
除了視頻中“彈弓”式的軌跡之外,無人機(jī)還可以沿著直線的“光束”或“回旋鏢”的軌跡飛行,即飛到一個位置上轉(zhuǎn)一圈,然后在飛回來。據(jù)研究人員介紹,此次測試使用的是經(jīng)過修改后,能夠用LED提供視覺反饋的Parrot Bebop無人機(jī),但是其視覺處理功能是在無人機(jī)外部進(jìn)行的。之所以使用該無人機(jī),是因?yàn)樗恍枰褂锰嗟哪芰俊?/div>
在測試中,這種控制無人機(jī)的技術(shù)工作的出奇好。用戶在直徑為0.8米的包圍圈內(nèi),可以控制無人機(jī)飛行8米遠(yuǎn)的距離。盡管研究人員指出:“由于在現(xiàn)實(shí)世界中,機(jī)器人會產(chǎn)生不可避免的錯誤,所以無人機(jī)并沒有完全按照直線進(jìn)行飛行。所以,大多數(shù)人都在設(shè)法讓飛行器在大約1米的范圍內(nèi)進(jìn)行飛行。”
最后,這里是從原論文中直接提取的一些結(jié)論:
雖然在論文中顯示已經(jīng)可以控制無人機(jī)在室外飛行45米,但是在不加修改的情況下,其飛行距離可以延伸至幾百米。如果無人機(jī)能夠在達(dá)到其軌跡峰值后能夠?qū)Ω信d趣的目標(biāo)進(jìn)行視覺伺服(servo),我們就可能控制無人機(jī)從一個人飛行到另一個人那,而兩人間的距離將超過一公里或者更多。這項(xiàng)工作的長期目標(biāo)是使用戶能夠與機(jī)器人和人工智能進(jìn)行互動,就行人類和訓(xùn)練有素的動物進(jìn)行交流一樣,就像在科幻小說中想象的一樣······最后,我們認(rèn)為通過這種方式使用機(jī)器人是非常有趣的,所以這種交互方式可以應(yīng)用在娛樂中。
(原文來自:IEEE Spectrum;智東西編譯)
推薦閱讀:



