
【導(dǎo)讀】電機(jī)是將電能轉(zhuǎn)換為機(jī)械能的設(shè)備的總稱(chēng)。也稱(chēng)為電動(dòng)機(jī)。它幾乎可以用于所有電子設(shè)備,例如手機(jī),白色家電和PC。在工業(yè)應(yīng)用中,電動(dòng)機(jī)用于各種驅(qū)動(dòng)器。可以說(shuō),制造工程師和電動(dòng)機(jī)是密不可分的。在本文中,我們將解釋各種電機(jī)操作原理和電機(jī)選擇方法。
1.電動(dòng)機(jī)的定義和原理
電動(dòng)機(jī)和發(fā)電機(jī)都是轉(zhuǎn)換電能和機(jī)械功的裝置。使用電能執(zhí)行機(jī)械功的設(shè)備稱(chēng)為電動(dòng)機(jī),將電能轉(zhuǎn)換為電能的設(shè)備稱(chēng)為發(fā)電機(jī)。它是電動(dòng)機(jī)還是發(fā)電機(jī)取決于電流是在磁場(chǎng)中流過(guò)導(dǎo)體還是在磁場(chǎng)中移動(dòng)。電磁力產(chǎn)生的基本原理可以用弗萊明的左右定律來(lái)解釋。
圖1顯示了如何通過(guò)使電流在磁場(chǎng)中流過(guò)導(dǎo)體來(lái)產(chǎn)生力。力量的產(chǎn)生可以用弗萊明的左手定律來(lái)解釋。如果磁場(chǎng)強(qiáng)度為B(T),電流大小為i(A),并且導(dǎo)體在磁場(chǎng)中的長(zhǎng)度為l(m),則洛倫茲力F = Bli(N)由麥克斯韋方程計(jì)算。會(huì)發(fā)生。
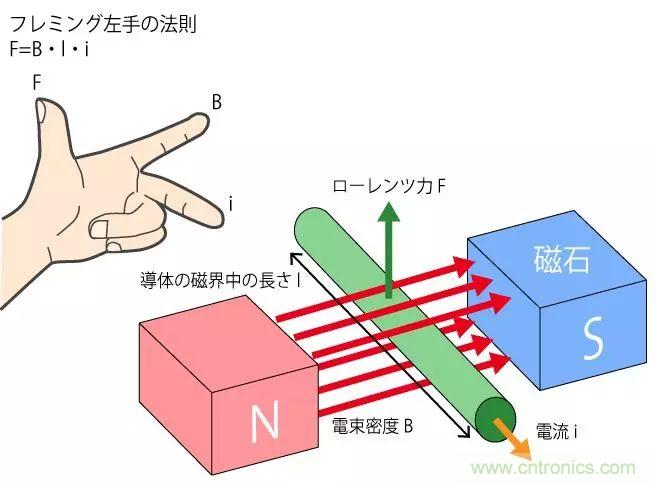
圖1:根據(jù)弗萊明左手定則生成力
圖2說(shuō)明了根據(jù)弗萊明右手法則通過(guò)在磁場(chǎng)中移動(dòng)導(dǎo)體來(lái)產(chǎn)生電壓的原理。如果導(dǎo)體的移動(dòng)速度為v(m / s),則生成的電壓e = Blv(V)。圖2中的磁場(chǎng)由永磁體制成,但是也可以通過(guò)使電流通過(guò)繞組的線圈產(chǎn)生磁場(chǎng)。那些產(chǎn)生磁場(chǎng)的磁體(例如永磁體和線圈)稱(chēng)為場(chǎng)磁體。
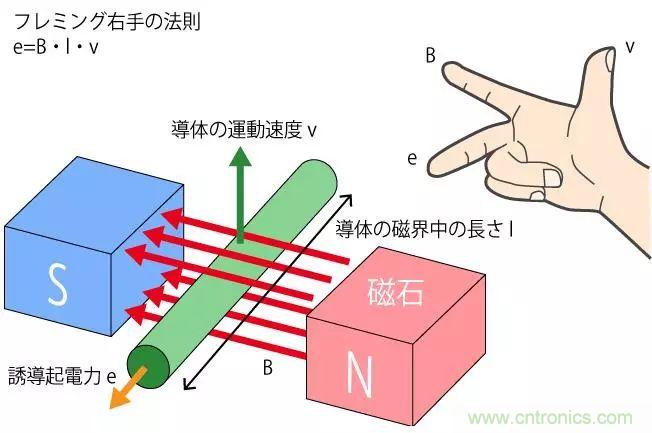
圖2:根據(jù)弗萊明右手定則產(chǎn)生電壓
電動(dòng)機(jī)通過(guò)流過(guò)勵(lì)磁線圈和導(dǎo)體的電流的相互作用產(chǎn)生旋轉(zhuǎn)力。電機(jī)發(fā)展的早期(約1830年)面臨的挑戰(zhàn)是如何將產(chǎn)生的力轉(zhuǎn)換為電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)。由于磁場(chǎng)產(chǎn)生的磁通方向是恒定的,因此有必要通過(guò)旋轉(zhuǎn)電流流過(guò)的導(dǎo)體來(lái)切換電流方向。使之成為可能的本發(fā)明是電刷和換向器機(jī)構(gòu)。結(jié)果,實(shí)現(xiàn)了能夠連續(xù)旋轉(zhuǎn)的DC電動(dòng)機(jī)。當(dāng)時(shí),直流電是主流,因此創(chuàng)建了由DC(直流)電源驅(qū)動(dòng)的電動(dòng)機(jī)。
后來(lái)隨著交流(AC)發(fā)電機(jī)的商業(yè)化,還開(kāi)發(fā)了以三相交流電為電源的電動(dòng)機(jī)。在交流電動(dòng)機(jī)中,三相交流電被提供給作為磁場(chǎng)線圈的定子繞組。由三相交流電產(chǎn)生的磁場(chǎng)的合成與交流電頻率同步旋轉(zhuǎn)。因此,與直流電動(dòng)機(jī)不同,交流電動(dòng)機(jī)自動(dòng)切換電流方向,不需要特殊的機(jī)構(gòu)。交流電動(dòng)機(jī)的定子繞組產(chǎn)生的磁場(chǎng)稱(chēng)為旋轉(zhuǎn)磁場(chǎng),當(dāng)頻率為f且極數(shù)為P時(shí),磁場(chǎng)以N = 120 f / P(rpm)的轉(zhuǎn)速旋轉(zhuǎn)。
大多數(shù)當(dāng)前的電動(dòng)機(jī),例如DC(直流)電動(dòng)機(jī)和AC(交流)電動(dòng)機(jī),都按照弗萊明左手定則及其所產(chǎn)生的洛倫茲力(Bli法則)運(yùn)行。然而,在電動(dòng)機(jī)開(kāi)發(fā)的早期,也將利用電磁體的吸引力的方法作為電磁力產(chǎn)生的原理。圖3示出了通過(guò)電磁力吸引產(chǎn)生力的原理。
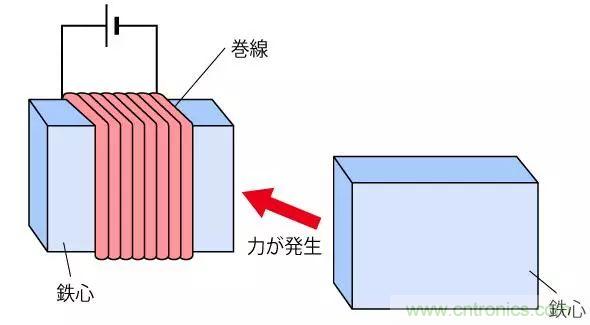
圖3:磁阻力原理
當(dāng)電流通過(guò)線圈狀磁體時(shí),磁體被磁化,并且在附近的磁體中被磁化,從而在磁軸重合的方向上產(chǎn)生力。該力的作用是使間隙之間的磁阻最小化,稱(chēng)為磁阻力。利用該力的磁阻電動(dòng)機(jī)的缺點(diǎn)在于,由于磁阻力隨著位移而變化,因此難以獲得恒定的旋轉(zhuǎn)力。為了克服這些缺點(diǎn),需要高級(jí)控制,因此,與直流電動(dòng)機(jī)和交流電動(dòng)機(jī)相比,磁阻電動(dòng)機(jī)的使用速度有所降低。
2.電機(jī)類(lèi)型
可以根據(jù)功率,旋轉(zhuǎn),磁場(chǎng),驅(qū)動(dòng)器和配置對(duì)電動(dòng)機(jī)進(jìn)行分類(lèi)(圖4)。
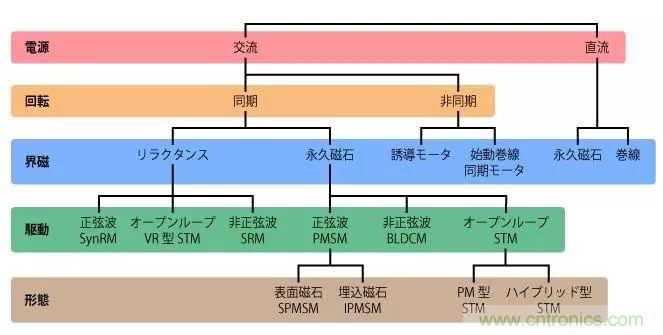
圖4:按電動(dòng)機(jī)驅(qū)動(dòng)原理分類(lèi)
在通過(guò)逆變器等控制電動(dòng)機(jī)之前,根據(jù)提供給電動(dòng)機(jī)的功率將其大致分為兩種。直流電源驅(qū)動(dòng)器和交流電源驅(qū)動(dòng)器。由直流電源驅(qū)動(dòng)的直流電動(dòng)機(jī)稱(chēng)為直流電動(dòng)機(jī),可以根據(jù)磁場(chǎng)是纏繞(線圈)還是永磁體來(lái)對(duì)直流電動(dòng)機(jī)進(jìn)行分類(lèi)。小容量直流電動(dòng)機(jī)使用永磁體(PM)作為磁場(chǎng)來(lái)實(shí)現(xiàn)高效率,而大容量電動(dòng)機(jī)則使用繞組磁場(chǎng)。
與交流(AC)電源一起使用的電動(dòng)機(jī)可以分為與交流產(chǎn)生的旋轉(zhuǎn)磁場(chǎng)同步旋轉(zhuǎn)或不同步旋轉(zhuǎn)。前者稱(chēng)為同步電動(dòng)機(jī),而后者的代表是感應(yīng)電動(dòng)機(jī)。還有一種長(zhǎng)期使用的電動(dòng)機(jī),它是使用轉(zhuǎn)子上的短路繞組作為感應(yīng)電動(dòng)機(jī)啟動(dòng)的,并在達(dá)到接近同步速度的轉(zhuǎn)速時(shí)切換為同步旋轉(zhuǎn)。這被歸類(lèi)為感應(yīng)電動(dòng)機(jī)。
同步電動(dòng)機(jī)的缺點(diǎn)是無(wú)法以商用頻率啟動(dòng)。因此,大多數(shù)工業(yè)電動(dòng)機(jī)是能夠通過(guò)如上所述將其作為感應(yīng)電動(dòng)機(jī)啟動(dòng)并將它們切換為同步旋轉(zhuǎn)而利用交流電源來(lái)啟動(dòng)的電動(dòng)機(jī)。同步電動(dòng)機(jī)可分為由永磁體和繞組組成的電動(dòng)機(jī),以及由感應(yīng)從定子繞組產(chǎn)生的磁通量的磁阻組成的磁阻電動(dòng)機(jī)。繞組式同步電動(dòng)機(jī)用于發(fā)電機(jī)等大容量領(lǐng)域,而在其他領(lǐng)域則使用以永磁體(PM)作為磁場(chǎng)的永磁電動(dòng)機(jī)。按照慣例,永磁勵(lì)磁同步電動(dòng)機(jī)稱(chēng)為永磁電動(dòng)機(jī)。
由諸如逆變器之類(lèi)的驅(qū)動(dòng)電路驅(qū)動(dòng)的驅(qū)動(dòng)器已細(xì)分為驅(qū)動(dòng)器。該驅(qū)動(dòng)器大致可分為兩種:一種是用正弦波電流作為同步電動(dòng)機(jī)驅(qū)動(dòng),另一種是根據(jù)磁極位置以矩形波驅(qū)動(dòng)的電動(dòng)機(jī),例如無(wú)刷直流電動(dòng)機(jī)。與無(wú)刷直流電動(dòng)機(jī)類(lèi)似,通過(guò)根據(jù)轉(zhuǎn)子的磁極位置切換勵(lì)磁相位(流過(guò)磁場(chǎng)的電流的相位)來(lái)將磁阻施加到磁場(chǎng)的開(kāi)關(guān)磁阻電動(dòng)機(jī)(在圖4中縮寫(xiě)為SRM)是矩形的。
3.超聲波馬達(dá)
電能和機(jī)械功可以通過(guò)電磁力以外的方法進(jìn)行轉(zhuǎn)換。已知利用作用在電容器的電極之間的力的靜電電動(dòng)機(jī)和利用壓電元件的超聲電動(dòng)機(jī)。盡管靜電馬達(dá)已作為MEMS(微機(jī)電系統(tǒng))而受到關(guān)注,但很少投入實(shí)際使用。另一方面,后一種超聲馬達(dá)用于特殊目的,例如驅(qū)動(dòng)相機(jī)鏡頭,因?yàn)樵擇R達(dá)可以被構(gòu)造成盤(pán)狀。
壓電元件(PZT:Pb(Zr,Ti)O 3,鋯鈦酸鉛)具有在施加電壓時(shí)沿垂直于電壓的方向延伸的特性。最初研究了利用該特性將位移改變?yōu)橹本€或旋轉(zhuǎn)運(yùn)動(dòng)以制造電動(dòng)機(jī)。但是膨脹和收縮只有幾微米。為了電動(dòng)機(jī)旋轉(zhuǎn),需要將壓電體和彈性體組合并以高頻率振動(dòng)的結(jié)構(gòu)。1980年,通過(guò)產(chǎn)生從壓電體到彈性體的行波發(fā)明了一種實(shí)用的電動(dòng)機(jī)。使用術(shù)語(yǔ)“超聲波馬達(dá)”是因?yàn)槠涓鶕?jù)彈性體的共振頻率以高于20kHz或更高的可聽(tīng)范圍的頻率(超聲波)被驅(qū)動(dòng)。圖5示出了行波超聲馬達(dá)的操作原理。
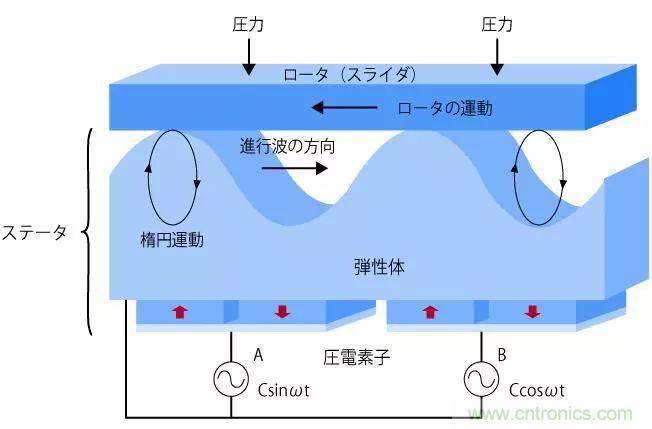
圖5:行波型超聲波電動(dòng)機(jī)的原理
定子由壓電元件和彈性體構(gòu)成的兩層結(jié)構(gòu),該壓電元件由兩組驅(qū)動(dòng)電極構(gòu)成。每個(gè)電極被布置為行波波長(zhǎng)的一半,并且被交替極化以具有相反的極性。當(dāng)將頻率接近彈性體的彎曲振動(dòng)的固有頻率的AC電壓施加到驅(qū)動(dòng)電極時(shí),壓電元件交替地膨脹和收縮,導(dǎo)致彈性體彎曲。
通過(guò)向兩個(gè)電極施加相位差為90度的交流電壓,合成在空間和時(shí)間上異相的兩個(gè)駐波,并獲得如圖4所示的行波。波在彈性體上的最大點(diǎn)通過(guò)繪制與行進(jìn)波相反的橢圓形軌跡而移動(dòng)。因此,當(dāng)在轉(zhuǎn)子(移動(dòng)體)和定子之間施加高壓時(shí),轉(zhuǎn)子在行波的波前與彈性體接觸,并且沿著振子表面上的橢圓軌跡在與行波相反的方向上發(fā)生摩擦。
推薦閱讀:



