

【導(dǎo)讀】無(wú)論是智能手機(jī)、可穿戴設(shè)備、虛擬現(xiàn)實(shí)耳機(jī),還是機(jī)器人吸塵器,當(dāng)今用戶都期望并要求這些設(shè)備始終按照指令運(yùn)行,并平穩(wěn)、準(zhǔn)確地適應(yīng)不斷變化的周圍環(huán)境。這需要精確的感測(cè)俯仰、滾轉(zhuǎn)和航向方向,而這些則是通過從設(shè)備內(nèi)置的加速度計(jì)、陀螺儀和磁力計(jì)收集的數(shù)據(jù)融合實(shí)現(xiàn)的。
簡(jiǎn)介
無(wú)論是智能手機(jī)、可穿戴設(shè)備、虛擬現(xiàn)實(shí)耳機(jī),還是機(jī)器人吸塵器,當(dāng)今用戶都期望并要求這些設(shè)備始終按照指令運(yùn)行,并平穩(wěn)、準(zhǔn)確地適應(yīng)不斷變化的周圍環(huán)境。這需要精確的感測(cè)俯仰、滾轉(zhuǎn)和航向方向,而這些則是通過從設(shè)備內(nèi)置的加速度計(jì)、陀螺儀和磁力計(jì)收集的數(shù)據(jù)融合實(shí)現(xiàn)的。
通常在現(xiàn)實(shí)世界中,事物永遠(yuǎn)不會(huì)像其看起來(lái)那么簡(jiǎn)單,例如,準(zhǔn)確確定航向(觀測(cè))方向便是一項(xiàng)巨大挑戰(zhàn),因?yàn)榇帕τ?jì)測(cè)量受到附近多個(gè)物體的負(fù)面影響。這些干擾性磁場(chǎng)影響,通常稱為硬鐵和軟鐵扭曲,可能由位于設(shè)備本身內(nèi)的各種元件和用戶周圍環(huán)境中的外部磁性物體引起。
本文旨在深入洞察和理解在當(dāng)今電子消費(fèi)設(shè)備中獲得可靠傳感器數(shù)據(jù)所需的有效設(shè)計(jì)技術(shù)和軟件解決方案,并提高用戶對(duì)最終產(chǎn)品的滿意度。本文將提供強(qiáng)大傳感器數(shù)據(jù)融合技術(shù)的示例,例如基于在標(biāo)準(zhǔn)使用期間獲得的陀螺儀信號(hào),對(duì)估算磁力計(jì)偏移加以利用,及其對(duì)用戶相關(guān)特征(例如行人和頭部跟蹤)的影響。
磁力挑戰(zhàn)
您是否曾由于智能手機(jī)導(dǎo)航應(yīng)用程序給出了錯(cuò)誤的指示,而找錯(cuò)了環(huán)島出口?使用虛擬現(xiàn)實(shí)耳機(jī)時(shí),您是否經(jīng)歷過突然的眩暈?或者您的“智能”機(jī)器人吸塵器是否一再被卡在角落里?這些問題中的大多數(shù),至少部分,是由不精確的慣性傳感器數(shù)據(jù)融合導(dǎo)出的不正確航向信息所造成的。那么,為什么最先進(jìn)的高精度傳感器仍然會(huì)記錄不準(zhǔn)確的信息,并且產(chǎn)生如此大的偏差?
在實(shí)驗(yàn)室外,所謂的地球恒定磁場(chǎng)的剛性磁線不斷被各種物體修改,如門框、桌子、椅子和其他金屬物品。基于其特定磁特性,這些物體通過稱為硬鐵和軟鐵扭曲的現(xiàn)象改變其周圍的磁場(chǎng)。
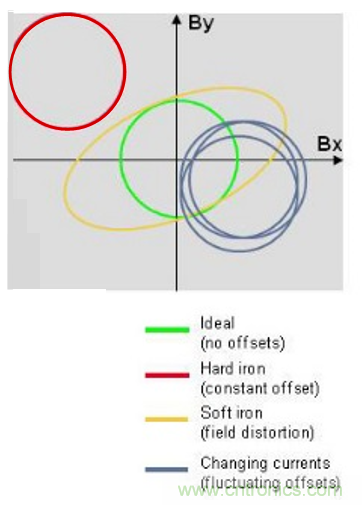
圖1:羅盤誤差的來(lái)源:外部磁場(chǎng)
諸如NdFeB、AlNiCo等硬磁材料(“硬鐵”)引起高殘余B場(chǎng)或“磁記憶”,而軟磁材料(“軟鐵”)則通常是諸如鐵(Fe)、鎳(Ni)等材料及其合金。
當(dāng)磁力計(jì)用于設(shè)備中時(shí),硬鐵扭曲由產(chǎn)生磁場(chǎng)的物體造成,例如揚(yáng)聲器內(nèi)的磁鐵,由此導(dǎo)致傳感器輸出中稱為“恒定偏移”的偏差,然后需要對(duì)其進(jìn)行補(bǔ)償。另一方面,軟鐵扭曲則是由“被動(dòng)”影響或扭曲其周圍磁場(chǎng)但自身不一定產(chǎn)生磁場(chǎng)的物體造成的,例如存儲(chǔ)卡插槽、電池、無(wú)線天線、門窗框架和各種其他周圍環(huán)境中的標(biāo)準(zhǔn)對(duì)象。這種類型的扭曲改變了磁球的實(shí)際形狀,并且很大程度上取決于材料相對(duì)于傳感器和磁場(chǎng)的定位。
如圖2所示,在典型的室內(nèi)區(qū)域,由于一般物體引起的磁場(chǎng)扭曲,羅盤方向變化很大,即羅盤的紅色“北”針指向各個(gè)方向。
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
圖2:典型室內(nèi)區(qū)域傳感器讀數(shù)(磁力計(jì))的變化
因此,補(bǔ)償硬鐵和軟鐵扭曲對(duì)于獲得有意義的磁力計(jì)讀數(shù)至關(guān)重要。這種補(bǔ)償需要在設(shè)備設(shè)計(jì)期間進(jìn)行復(fù)雜的程序,并且在實(shí)際使用期間將結(jié)果結(jié)合到傳感器的軟件中,如下文中的進(jìn)一步描述。
接受扭曲
以下系統(tǒng)方法可用于補(bǔ)償影響磁力計(jì)讀數(shù)的失真:
•使用軟鐵矩陣在設(shè)計(jì)階段進(jìn)行補(bǔ)償
•通過標(biāo)準(zhǔn)“八字形動(dòng)作”在使用中校準(zhǔn)軟件
•通過“自然使用動(dòng)作”智能校準(zhǔn)軟件
使用軟鐵矩陣在設(shè)計(jì)階段進(jìn)行補(bǔ)償
來(lái)自位于終端設(shè)備(例如智能手機(jī))內(nèi)部部件的軟鐵扭曲是恒定的,因此可以通過使用一次性解決方案來(lái)補(bǔ)償。這種補(bǔ)償需要所謂的“軟鐵補(bǔ)償矩陣”(SIC Matrix),對(duì)此,設(shè)計(jì)者在設(shè)備中具有更廣泛的布局選項(xiàng)。這些補(bǔ)償后傳感器的讀數(shù)具有明顯更高的精度,與未補(bǔ)償讀數(shù)相比達(dá)±2°,其中誤差范圍可以輕松達(dá)到±10°。校準(zhǔn)通過3D線圈系統(tǒng)(亥姆霍茲線圈)進(jìn)行,該線圈系統(tǒng)由在同一軸上對(duì)中的兩個(gè)螺線管電磁鐵組成,可抵消這些干擾性外部磁場(chǎng),以提供“清潔”的磁環(huán)境。帶有慣性傳感器的設(shè)備被放置在此清潔環(huán)境中,并接受測(cè)量,以創(chuàng)建磁力計(jì)的原始數(shù)據(jù)記錄,然后將其輸入數(shù)據(jù)驅(qū)動(dòng)工具,生成SIC矩陣。之后,該SIC矩陣將合并至軟件驅(qū)動(dòng)器中,并永久補(bǔ)償影響磁力計(jì)數(shù)據(jù)的設(shè)備內(nèi)軟鐵扭曲。
這種方法可以在實(shí)驗(yàn)室條件下估算軟鐵效應(yīng),當(dāng)然,使用過程中的變化和附加設(shè)備的影響無(wú)法得到補(bǔ)償。盡管如此,這依然是一種非常有效的設(shè)備內(nèi)部件校準(zhǔn)技術(shù),強(qiáng)烈建議于設(shè)計(jì)階段在傳感器制造商專家的幫助下準(zhǔn)確生成SIC矩陣并加以應(yīng)用。
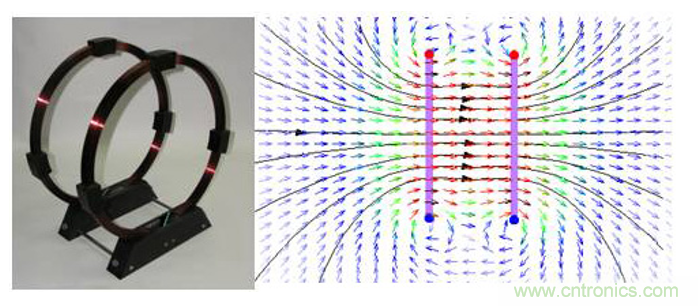
圖3:3D(亥姆霍茲)線圈,用于設(shè)備內(nèi)磁力計(jì)校準(zhǔn)
遺憾的是,在通常情況下,當(dāng)應(yīng)用于實(shí)際PCB時(shí),實(shí)驗(yàn)室校準(zhǔn)結(jié)果無(wú)法準(zhǔn)確工作,因?yàn)槠渲袝?huì)生成被稱為“禁區(qū)”的區(qū)域,使這些裝置的準(zhǔn)確性極度降低,以致完全無(wú)法使用。
Bosch Sensortec的3D軟鐵補(bǔ)償技術(shù)大大減少了這一“禁區(qū)”現(xiàn)象。例如,如果在距離NFC天線僅9mm處測(cè)量傳感器數(shù)據(jù)失真,在補(bǔ)償之前,最大航向誤差為8°,而在補(bǔ)償之后,所有海拔高度的最大誤差僅為1.5°。
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
圖4:沒有軟鐵補(bǔ)償?shù)拇徘?br />
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
圖5:有軟鐵補(bǔ)償?shù)拇徘?/div>
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
據(jù)融合:提升增強(qiáng)游戲、導(dǎo)航和VR用戶體驗(yàn)的關(guān)鍵組件")
通過“八字形動(dòng)作”在使用中進(jìn)行校準(zhǔn)
此方法并非實(shí)驗(yàn)室密集型,但只需通過在已知的磁性清潔環(huán)境中移動(dòng)設(shè)備(例如智能手機(jī))便可收集大量有價(jià)值的數(shù)據(jù)。理想的動(dòng)作是指沿最大定位范圍測(cè)量磁性的運(yùn)動(dòng),由此幫助估算所有情況下的磁偏差。因此,該技術(shù)通常使用覆蓋所有三個(gè)軸向的八字形運(yùn)動(dòng)來(lái)執(zhí)行。
圖6:令智能手機(jī)在3D空間中以八字形圖案移動(dòng)
該圖案可描繪出由磁性扭曲而變形的磁球部分。從獲得的坐標(biāo)可以非常精確地估算磁球變形,以導(dǎo)出所需的校準(zhǔn)系數(shù)。使用該方法估算的偏移將用于補(bǔ)償來(lái)自外部環(huán)境的硬鐵扭曲。
圖7:沒有偏移補(bǔ)償?shù)膫鞲衅鲾?shù)據(jù)
圖8:有偏移補(bǔ)償?shù)膫鞲衅鲾?shù)據(jù)
相當(dāng)多的智能手機(jī)設(shè)備和操作系統(tǒng)制造商仍然依賴于這種八字形校準(zhǔn)技術(shù)。出于校準(zhǔn)目的,當(dāng)今的智能手機(jī)經(jīng)常提示最終用戶使用地圖應(yīng)用程序在空間中進(jìn)行八字形動(dòng)作。但是,通過在3D空間中移動(dòng)設(shè)備來(lái)創(chuàng)建此模式可能需要10秒以上,并且如果用戶將其手機(jī)用于較為緊急的目的(例如玩動(dòng)作游戲),或執(zhí)行對(duì)安全性要求較高的任務(wù)(例如在汽車內(nèi)使用智能手機(jī)導(dǎo)航),那么暫停游戲會(huì)讓玩家十分掃興,而將注意力從駕駛汽車轉(zhuǎn)至校準(zhǔn)設(shè)備則會(huì)造成安全風(fēng)險(xiǎn)。
盡管如此,還是通常建議用戶使用這種方法,因?yàn)樗梢蕴峁┛煽康慕Y(jié)果。但是,只有當(dāng)用戶實(shí)際上能夠花時(shí)間重新校準(zhǔn)設(shè)備,并且物理上允許通過在3D空間中以八字形移動(dòng)設(shè)備時(shí),此方法才適用。
通過“自然使用動(dòng)作”進(jìn)行智能校準(zhǔn)
盡管八字形動(dòng)作非常適合智能手機(jī),但在物理上也許并不可行,并且可能對(duì)其他類型的設(shè)備來(lái)說,執(zhí)行起來(lái)會(huì)比較困難或奇怪,例如腕部可穿戴設(shè)備、增強(qiáng)/虛擬現(xiàn)實(shí)耳機(jī)、入耳式可穿戴設(shè)備和機(jī)器人吸塵機(jī)。
磁力計(jì)校準(zhǔn)背后的基本理念在于通過估算磁球與地球磁場(chǎng)矢量的偏差作為半徑來(lái)估算磁力計(jì)的偏移。為了降低校準(zhǔn)所需的時(shí)間并以更小、更自然的運(yùn)動(dòng)校準(zhǔn)設(shè)備,可使用陀螺儀信號(hào)輔助磁場(chǎng)傳感器的校準(zhǔn)。
校正后的陀螺儀信號(hào)相對(duì)于最后磁場(chǎng)值定義其旋轉(zhuǎn)。一旦確定了新的磁場(chǎng)值,便會(huì)將其饋入擴(kuò)展卡爾曼濾波器(EKF)。EKF估計(jì)磁力計(jì)偏移和磁場(chǎng)矢量的大?。ò霃剑?。磁強(qiáng)計(jì)干擾檢測(cè)基于卡爾曼濾波器的殘差。
由于這些快速傳統(tǒng)型磁力計(jì)校準(zhǔn)器利用陀螺儀數(shù)據(jù),因此在重新校準(zhǔn)過程中被校準(zhǔn)的設(shè)備必須處于靜止?fàn)顟B(tài),即陀螺儀本身在校準(zhǔn)期間不會(huì)漂移。然而,對(duì)于較新的“體戴式”裝置而言,這并不可行,因?yàn)檫@些時(shí)刻、并且是在較長(zhǎng)的時(shí)間段內(nèi)處于使用和運(yùn)動(dòng)中。
定義了這個(gè)問題后,Bosch Sensortec專注于通過開發(fā)“自然使用型”快速磁力計(jì)校準(zhǔn)軟件來(lái)迎接挑戰(zhàn)。該軟件針對(duì)每種不同類型設(shè)備的典型用途獲得配置,即使這些處于恒定運(yùn)動(dòng)中。其目標(biāo)在于確保即使用戶不必做出任何特定、有意的動(dòng)作,設(shè)備中的慣性傳感器也可以自動(dòng)且準(zhǔn)確地校準(zhǔn),以實(shí)現(xiàn)在變化環(huán)境中的使用。
以下將介紹可穿戴設(shè)備、控制器和耳機(jī)的幾個(gè)示例:
腕部可穿戴設(shè)備
對(duì)于佩戴腕表或健身追蹤器的人來(lái)說,經(jīng)常瀏覽設(shè)備、查看計(jì)算的步數(shù)或燃燒的卡路里、閱讀消息通知,或只是查看時(shí)間再自然不過了。由于大多數(shù)用戶不知道自己位于會(huì)影響其磁力計(jì)的材料附近,或者甚至在其設(shè)備中安裝了磁力計(jì),因此設(shè)備需要在不知情的情況下在后臺(tái)執(zhí)行校準(zhǔn)。此外,如果用戶必須在空中揮手以校準(zhǔn)“智能腕表”,看起來(lái)會(huì)很奇怪。因此,Bosch Sensortec磁力計(jì)校準(zhǔn)器可在后臺(tái)靜音工作,無(wú)論何時(shí)用戶查看手腕,都可以補(bǔ)償磁力計(jì)偏移。
統(tǒng)計(jì)學(xué)已經(jīng)證明,只需做出兩三個(gè)“查看”設(shè)備的動(dòng)作,這種用于可穿戴設(shè)備的快速磁力計(jì)校準(zhǔn)器便可估算出偏移,而且以典型且較低的數(shù)據(jù)速率運(yùn)行。
圖9:腕部可穿戴設(shè)備中航向誤差的系統(tǒng)消除
該校準(zhǔn)程序?qū)κ覂?nèi)和室外導(dǎo)航應(yīng)用都很有效。例如,使用九軸慣性傳感器估算用戶位置和步行軌跡的PDR(行人航位推算)應(yīng)用程序在激活校準(zhǔn)器時(shí)具有相當(dāng)高的精度。下面的例子清楚地表明,雖然兩個(gè)軌跡估算都是從0.0開始,但在約為2x200m的短行走距離中未校準(zhǔn)設(shè)備的累積航向誤差導(dǎo)致的位置誤差超過43%。
圖10:沒有磁力計(jì)重新校準(zhǔn)的PDR軌跡
圖11:有磁力計(jì)重新校準(zhǔn)的PDR軌跡
虛擬和增強(qiáng)現(xiàn)實(shí)耳機(jī)
與此類似,現(xiàn)實(shí)中無(wú)法要求虛擬現(xiàn)實(shí)耳機(jī)的用戶經(jīng)常以八字形運(yùn)動(dòng)移動(dòng)其頭部,尤其是佩戴耳機(jī)時(shí)。特別是對(duì)于耳機(jī),由于大腦會(huì)記錄用戶實(shí)際運(yùn)動(dòng)和在屏幕上看到的視覺圖像之間的對(duì)準(zhǔn)偏差,即使相對(duì)較小的航向和水平傾斜偏差也可能導(dǎo)致非常不愉快的眩暈癥狀。
Bosch Sensortec的耳機(jī)磁力計(jì)校準(zhǔn)器校準(zhǔn)磁力計(jì),同時(shí)用戶可自然地將頭部繞頸部軸線移動(dòng)。校準(zhǔn)的積極效果已明顯地在頭部跟蹤算法和多個(gè)AR/VR子使用案例中的關(guān)鍵性能定位結(jié)果中得到證明。
圖12:AR/VR耳機(jī)——帶磁力計(jì)校準(zhǔn)的動(dòng)態(tài)運(yùn)動(dòng)
游戲控制板,VR/TV遙控器
隨著定向傳感器滲透到越來(lái)越多的電視遙控器中,以及VR遙控器和游戲控制板向應(yīng)用程序開發(fā)者提供越來(lái)越復(fù)雜的服務(wù),收集準(zhǔn)確可靠的航向數(shù)據(jù)并使真北與內(nèi)容顯示設(shè)備彼此協(xié)調(diào)變得至關(guān)重要。這一問題尤其體現(xiàn)在,當(dāng)用戶手持控制裝置時(shí),盡管他們的手靜止,但依然看到光標(biāo)在前進(jìn)中漂移,或光標(biāo)朝著與其實(shí)際手部動(dòng)作不同的方向移動(dòng)。
同樣,Bosch Sensortec的磁力計(jì)校準(zhǔn)器考慮到遙控器或游戲控制板的自然運(yùn)動(dòng),并大大減少了航向偏差,如下面的實(shí)際數(shù)據(jù)所示。
圖13:游戲控制板/VR遙控精度與磁力計(jì)校準(zhǔn)
綜述
3D線圈和數(shù)據(jù)驅(qū)動(dòng)工具的組合可用于創(chuàng)建和利用SIC矩陣,此外,通過借助用戶界面通知用戶進(jìn)行八字形動(dòng)作,和集成自然使用型快速磁力計(jì)校準(zhǔn)器軟件,九軸傳感器數(shù)據(jù)融合的可靠性如今獲得大幅提升。這一點(diǎn)非常重要,因?yàn)榇帕τ?jì)精度和傳感器數(shù)據(jù)融合是智能手機(jī)、可穿戴設(shè)備、AR/VR耳機(jī)和控制單元,甚至機(jī)器人真空吸塵器等各種設(shè)備的重要組成部分。
Bosch Sensortec的3D軟鐵補(bǔ)償將“禁區(qū)”減少了70%,為設(shè)計(jì)師和布局工程師提供了更大的靈活性和準(zhǔn)確性保證,并顯著降低了對(duì)產(chǎn)品再原型設(shè)計(jì)的需求。
此外,使用中校準(zhǔn)以及智能校準(zhǔn)技術(shù)通過降低現(xiàn)代環(huán)境中普遍存在的硬鐵扭曲,大大提高了航向精度。雖然使用中校準(zhǔn)依賴于用戶在三維空間中進(jìn)行八字形動(dòng)作,但Bosch Sensortec開發(fā)的智能校準(zhǔn)器可以巧妙地融合設(shè)備自然使用期間收集的傳感器數(shù)據(jù),以實(shí)現(xiàn)相同的結(jié)果。例如,對(duì)于智能腕表等可穿戴設(shè)備,軟件通過傳感器數(shù)據(jù)融合提高了行人跟蹤的可靠性。與此類似,通過分析耳機(jī)用戶的各種典型動(dòng)作,例如躲避、低頭和彎腰、跳躍和坐下等,Bosch Sensortec比市面上其他類似的傳統(tǒng)型解決方案實(shí)現(xiàn)了更高的傳感器數(shù)據(jù)融合精度。
雖然航向精度的提高只是傳感器數(shù)據(jù)融合如何改善最終用戶體驗(yàn)的一個(gè)例子,但Bosch Sensortec的傳感器數(shù)據(jù)融合軟件中還包含其他多種算法,可以幫助設(shè)備制造商令自己的設(shè)備脫穎而出,并大大改善終端用戶體驗(yàn)。



