
【導(dǎo)讀】鑒于反饋通路中相移(或者稱作延遲)引起的諸多問題,我們一直在追求運(yùn)算放大器的穩(wěn)定性。通過上周的討論我們知道,電容性負(fù)載穩(wěn)定性是一個棘手的問題。如果您才剛剛接觸我們的討論,那么您應(yīng)該首先閱讀前兩篇博客文章《振蕩原因》和《“馴服”振蕩》。
“麻煩制造者”運(yùn)算放大器開環(huán)輸出電阻 (Ro),實際并非運(yùn)算放大器內(nèi)部的一個電阻器。它是一個依賴于運(yùn)算放大器內(nèi)部電路的等效電阻。如果不改變運(yùn)算放大器,也就不可能改變這種電阻。CL 為負(fù)載電容。如果您想驅(qū)動某個 CL,您就會受困于 Ro 和 CL 形成的極點頻率。G=1 時 20MHz 運(yùn)算放大器的反饋環(huán)路內(nèi)部 1.8MHz 極點頻率便會帶來問題。請查看圖 1。
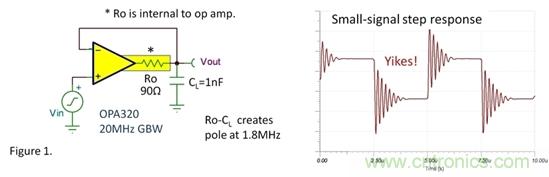
對于這個問題,有一種常見解決方案—調(diào)慢放大器響應(yīng)速度。想想看,環(huán)路具有固定的延遲,其來自 Ro 和 CL。為了適應(yīng)這種延遲,放大器必須更慢地響應(yīng),這樣它才不至于超過去,錯過希望獲得的終值。
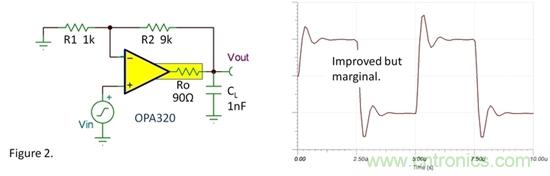
減速的一種好辦法是,將運(yùn)算放大器放置在更高的增益中。高增益降低了閉環(huán)放大器的帶寬。圖 2 顯示了驅(qū)動相同 1nF 負(fù)載但增益為 10 的 OPA320,其小步進(jìn)值的響應(yīng)性能得到極大提高,但仍然很小。將增益增加到 25 甚至更大,似乎相當(dāng)好。
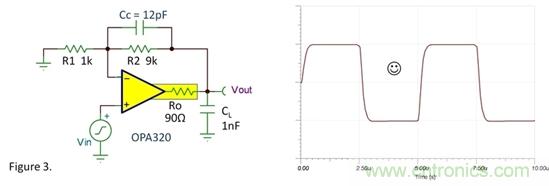
但是另一個問題出現(xiàn)了。圖 3 增益仍為 10,但增加了 Cc,其將速度又降低了 1 位。Cc 過小時,響應(yīng)看起來更像圖 2。Cc 過大時,可能出現(xiàn)問題,其看起來更像圖 1。
恰到好處地補(bǔ)償,可解決“靠近速率”問題——波特圖分析。這已經(jīng)超出一篇博客文章所能討論的范圍了,因此我只能試著給您一些建議。在解決這些問題時,可以借助于您的直覺,但是如果您提高補(bǔ)償操作的能力水平,那么就需要向波特先生(波特圖)請教了。
推薦閱讀:





