
【導(dǎo)讀】對于不經(jīng)常使用雙向可控硅的設(shè)計人員來說,「負(fù)電壓」可能聽起來很奇怪,因為世界上不可能存在采用負(fù)電壓工作的集成電路。然而,正如本文所述,從正輸出驅(qū)動雙向可控硅僅需簡單的解決方案即可,但在某些時候,采用負(fù)輸出驅(qū)動雙向可控硅更為合適。
在交流電源里,電壓有時為正有時為負(fù)。對于不經(jīng)常使用雙向可控硅的設(shè)計人員來說,「負(fù)電壓」可能聽起來很奇怪,因為世界上不可能存在采用負(fù)電壓工作的集成電路。然而,在某些應(yīng)用,采用負(fù)輸出驅(qū)動雙向可控硅更為合適。
在交流電源里,電壓有時為正有時為負(fù)。對于不經(jīng)常使用雙向可控硅的設(shè)計人員來說,「負(fù)電壓」可能聽起來很奇怪,因為世界上不可能存在采用負(fù)電壓工作的集成電路。然而,正如本文所述,從正輸出驅(qū)動雙向可控硅僅需簡單的解決方案即可,但在某些時候,采用負(fù)輸出驅(qū)動雙向可控硅更為合適。
正負(fù)電源供應(yīng)原理
如果功率半導(dǎo)體組件只能通過電源進行控制,其驅(qū)動參考點與市電(線路或中性端子)連接時,通常須要使用非絕緣電源。例如,觸發(fā)雙向可控硅、ACST、ACS或可控硅整流器(SCR)等交流開關(guān)的情況。這些組件均由柵極電流進行控制。該柵極電流只能施加在柵極針腳上,并在柵極和交流開關(guān)參考端子之間循環(huán)流動,其中參考端子指可控硅整流器的陰極(K)、雙向可控硅的A1或ACST和ACS的COM。由于交流開關(guān)控制電路和其電源只能連接到組件參考端子(回聯(lián)機電壓),因此須使用非絕緣電源。
有兩種方式將該驅(qū)動參考點與非絕緣電源連接:
方案1:將控制電路接地(VSS)與驅(qū)動參考點連接。
方案2:將控制電路電源電壓(VDD)與驅(qū)動參考點連接。
由于開關(guān)驅(qū)動參考點也是零電壓點(VSS),因此圖1a所示的方案1最常用。由于電源電壓(VDD)實際高于市電端子電勢(線路或中性),且電源端子電勢與驅(qū)動參考點(VSS)連接,因此,此種拓?fù)浞Q為正電壓。如果電源為5V,則VDD比市電參考點(圖1a示例中的中性端子)高5V。如下文所述,該拓?fù)浣Y(jié)構(gòu)僅可直接與標(biāo)準(zhǔn)雙向可控硅和可控硅整流器一起使用,而不能與非標(biāo)準(zhǔn)雙向可控硅、ACS和ACST一起使用。但根據(jù)本文結(jié)尾所述,使用者可進行某些簡單修改來控制所有正電壓的組件。
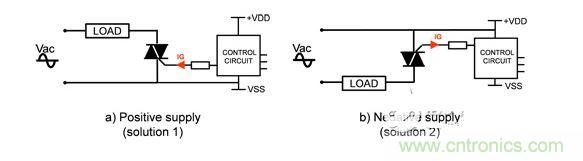
圖1 電源極性定義。
圖1b所示的方案2稱為負(fù)電壓。電源電壓參考點(VSS)實際低于與市電參考點連接的A1或COM。如果電源為5V,則VSS比線路參考點低5V,或與線路相比為–5V。根據(jù)下文所述,該拓?fù)浣Y(jié)構(gòu)可與所有雙向可控硅、ACS和ACST一起使用,但不能與可控硅整流器一起使用。
電源輸出極性與交流開關(guān)技術(shù)的一致性
為開啟雙極器件等交流開關(guān),必須在開關(guān)柵極針腳(G)和驅(qū)動參考端子之間施加?xùn)艠O電流。然后會出現(xiàn)幾種情況。
.對于可控硅整流器,該柵極電流必須為正(從G向K流動)。
.對于雙向可控硅和ACST,該柵極電流可為正也可為負(fù)(取決于施加給組件的電壓)。
.對于ACS,該柵極電流必須為負(fù)(從COM向G流動)。
采用正電壓很容易驅(qū)動可控硅整流器。如果陰極與VSS相連,如圖1a所示,當(dāng)控制電路(通常是一個微控制器)輸出針腳處于較高電平時,電流來源于可控硅整流器的柵極。另一方面,直接驅(qū)動ACS需要負(fù)電源,如圖1b所示。因此,當(dāng)控制電路輸出針腳處于較低電平時,電流應(yīng)來自可控硅整流器的柵極。
對于雙向可控硅、ACS和ACST,可根據(jù)開啟前組件的柵極電流極性和電壓極性定義四個觸發(fā)象限。當(dāng)柵極電流來源于柵極時,其可視為正電流。當(dāng)電壓與驅(qū)動參考點有關(guān)時,電壓可視為正電壓。不同的象限分別為
.象限一:正柵極電流和正電壓。
.象限二:負(fù)柵極電流和正電壓。
.象限三:負(fù)柵極電流和負(fù)電壓。
.象限四:正柵極電流和負(fù)電壓。
根據(jù)雙向可控硅、ACS和ACST組件技術(shù),這些組件可在每個象限中觸發(fā)或僅可在某些象限中觸發(fā)。對于可控硅整流器,由于僅正柵極電流才可開啟組件,且僅在其陽極和陰極端子上施加正電壓時才可開啟,這些組件通常不考慮觸發(fā)象限。
表1顯示了不同組件技術(shù)適用的不同象限,并且列出了構(gòu)成直接驅(qū)動電路的電源極性一致性,如表1所示。可看出負(fù)電源適用于所有交流開關(guān)技術(shù),但可控硅整流器除外。由于負(fù)輸出允許使用任何其他技術(shù)更改某一零件號,因此采用負(fù)輸出成為首選。
電源拓?fù)浣Y(jié)構(gòu)易對輸出極性產(chǎn)生影響
如果微控制器(MCU)供應(yīng)正電壓并采用微處理器觸發(fā)第三象限的雙向可控硅、ACST或ACS,就會出現(xiàn)問題。如表1所示,在這種情況下確實不能進行直接控制。此外,開關(guān)電源(SMPS)經(jīng)常用于適應(yīng)不同的待機功耗指令或標(biāo)準(zhǔn)。由于具有正輸出的開關(guān)電源是低輸出電流脫機轉(zhuǎn)換器最常用的拓?fù)浣Y(jié)構(gòu),因此主要根據(jù)降壓轉(zhuǎn)換器的選型來進行開關(guān)電源的選型。
但在許多應(yīng)用中僅須控制交流開關(guān),因此應(yīng)施加負(fù)電壓。而降壓-升壓轉(zhuǎn)換器允許負(fù)輸出。這種拓?fù)浣Y(jié)構(gòu)與降壓轉(zhuǎn)換器同樣易于實現(xiàn)。此外,對于降壓-升壓轉(zhuǎn)換器,由于其要求使用降壓拓?fù)浣Y(jié)構(gòu),因此不需要增加輸出負(fù)載電阻或輸出穩(wěn)壓管。實際上,對于降壓,輸出電容器在每次MOSFET接通期間都會充電,從而在無負(fù)載或較小負(fù)載的情況下導(dǎo)致輸出過高。
降壓-升壓轉(zhuǎn)換器的效率及最大輸出電流應(yīng)低于降壓轉(zhuǎn)換器,而輸出電容器應(yīng)大于降壓轉(zhuǎn)換器。實際上,對于降壓轉(zhuǎn)換器,所有電感電流都為輸出電容器充電,而對于降壓-升壓轉(zhuǎn)換器,電感電流則僅在續(xù)流期間為輸出電容器充電。但230V的交流/12V直流轉(zhuǎn)換器占空比較低,且降壓和降壓-升壓性能之間的差異不大。
如果兩個拓?fù)浣Y(jié)構(gòu)配有相同的電抗組件,那么它們的效率類似。
雖然帶有負(fù)輸出的開關(guān)電源可供使用,但我們?nèi)詫⒄敵鲎鳛槭走x。在待機模式下,正輸出的功率消耗更低。實際上,我們發(fā)現(xiàn)正線性穩(wěn)壓器的內(nèi)部功耗在50μA范圍內(nèi),而負(fù)穩(wěn)壓器的一般功耗約為2mA。
這種靜態(tài)電流極大影響了開關(guān)電源的待機功耗。采用正輸出的另一原因在于3.3V微控制器的廣泛推廣,但卻很難找到功耗較低的精確3.3V負(fù)穩(wěn)壓器。
因此,應(yīng)采用圖2的示意圖,將負(fù)電源的優(yōu)勢和正穩(wěn)壓器的優(yōu)勢結(jié)合起來。在該示意圖中,意法半導(dǎo)體旗下ST715M33R正穩(wěn)壓器的最大靜態(tài)電流為5.5μA,用于顯示「負(fù)」15V輸出提供的3.3V電源實現(xiàn)情況,而該「負(fù)」15V輸出可以來自使用VIPer06電路的降壓-升壓轉(zhuǎn)換器或反馳式電源轉(zhuǎn)換器(Flyback Converter)。這樣,微控制器便可減弱來自T1635T-8雙向可控硅、T系列第三象限組件的電流。
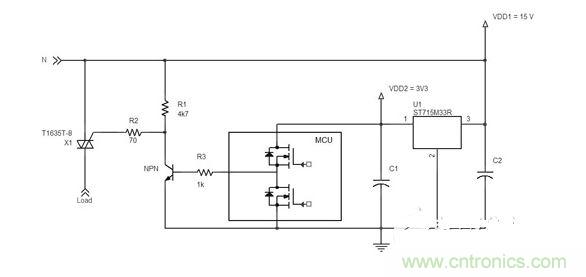
圖2 用于雙向可控硅控制電路負(fù)電壓的正穩(wěn)壓器。
調(diào)整柵極電路 正電壓成為新選擇
除了選擇電源拓?fù)浣Y(jié)構(gòu)外,還有其他原因須要使用正電源。例如,傳感器與市電電源連接的應(yīng)用情況。這樣可對某些特定電氣參數(shù)進行監(jiān)測。例如,對于通用馬達裝置,通常我們會與交流開關(guān)串聯(lián)增加一個分流電阻器來感知負(fù)載電流,從而實現(xiàn)速度或扭矩(Torque)的死循環(huán)控制。在電能計量應(yīng)用中,為計算電網(wǎng)中的能量損耗必須測量市電電源電壓。
由于感知分路電流或線路電壓增加情況下的電壓增加似乎更加合理,因此我們會采用傳統(tǒng)方式對電路施加正電壓。此類方式還適用于負(fù)電壓。因此,我們對微控制器的固件邏輯進行調(diào)整,將此逆向測量措施考慮在內(nèi)。
如果明確選擇了正電壓,我們?nèi)杂蟹桨竵眚?qū)動第三象限的雙向可控硅、ACS或ACST。如圖3a所示,一種解決方案是與柵極電阻器(R1)簡單并聯(lián)增加一個電容器(C1),減弱來自雙向可控硅柵極的電流。
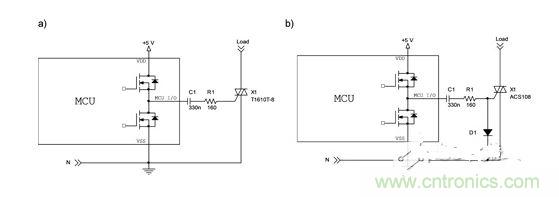
圖3 采用正電壓的第三象限雙向可控硅或ACS驅(qū)動電路。
該示意圖的工作原理如下:
.當(dāng)微控制器I/O針腳處于高電平(VDD)時,電容器C1通過R1和雙向可控硅柵極充電。由于第三象限的雙向可控硅不能在第四象限觸發(fā),因此在端子A2和A1的電壓為負(fù)時,該雙向可控硅不會開啟(但如果第一象限的電壓為正,則可以開啟雙向可控硅)。
.當(dāng)C1電容器充滿電后(向電壓為5V的微控制器供電),柵極電流消失。
.當(dāng)微控制器I/O針腳處于低電平(VSS)時,C1通過R1放電,為雙向可控硅柵極提供負(fù)電流。如果第二象限或第三象限的端子電壓為正或負(fù),則可分別觸發(fā)這兩個象限的雙向可控硅。在電容器C1放電前,電流一直為負(fù)。
圖3b給出了圖3a示意圖控制ACS器件(如本示例中的ACS108)特殊情況的變型。由于此類器件展示了COM和G端子之間的單獨P-N節(jié)并能夠阻止所有從G流向COM的電流,因此增加D1二極管,用于在微控制器I/O針腳處于高電平時對C1電容器充電。
對于這兩種示意圖,在微控制器I/O針腳施加爆發(fā)電壓脈沖時,須施加?xùn)艠O交流電流。這種控制方法的優(yōu)勢在于,電容器會阻礙重置或封閉造成微控制器侵害時產(chǎn)生的直流電流,并提高應(yīng)用的安全等級。
多種電源解決方案滿足降低待機功耗需求
為滿足待機功耗的不同標(biāo)準(zhǔn),開關(guān)電源的應(yīng)用越來越頻繁。通常人們使用帶有正輸出的電源,但當(dāng)負(fù)電壓滿足各種交流開關(guān)的條件時,負(fù)電壓可能更為合適。如果穩(wěn)壓器能降低待機功耗,首選正輸出。一種解決方案是對電路進行調(diào)整,確保正穩(wěn)壓器可與負(fù)電壓一起使用。另一種解決方案是在柵極電路內(nèi)簡單增加一個電容器,確保即使在選擇正電源的情況下,也能降低雙向可控硅柵極產(chǎn)生的電流。



