
【導(dǎo)讀】在高性能電機(jī)和伺服驅(qū)動器中,基于隔離式sigma-delta(∑-?)的模數(shù)轉(zhuǎn)換器(ADC)已成為首選的相電流測量方法。這些轉(zhuǎn)換器以其強(qiáng)大的電流隔離和卓越的測量性能而聞名。隨著新一代ADC的推出,其性能也在不斷提高,但是,要充分利用最新的ADC的功能,就需要對其他的電機(jī)驅(qū)動器進(jìn)行相應(yīng)的設(shè)計。
本文是兩篇系列文章的第1部分。第1部分介紹在電機(jī)控制應(yīng)用中,使用sinc濾波器對∑-?編碼數(shù)據(jù)進(jìn)行解調(diào)。然后,詳細(xì)探討了sinc濾波器和控制算法同步的不同方法。本系列的第2部分提出了一種新的sinc濾波器架構(gòu),可以提高電機(jī)控制應(yīng)用的測量性能。接著討論采用HDL代碼實現(xiàn)sinc濾波器,以獲得優(yōu)異性能的方法;最后給出了基于FPGA的3相伺服驅(qū)動器的測量結(jié)果。
簡介
電機(jī)驅(qū)動器制造商不斷提高其產(chǎn)品的性能和魯棒性。一些改進(jìn)是通過采用更先進(jìn)的控制算法和更高的計算能力實現(xiàn)的。其他改進(jìn)則通過最小化反饋電路中的非理想效應(yīng)來實現(xiàn),比如延遲、傾斜和溫度漂移。1
就電機(jī)控制算法的反饋而言,最關(guān)鍵的部分是相電流的測量。隨著控制性能提高,系統(tǒng)對時序精度、偏移/增益誤差、多反饋通道的同步等非理想效應(yīng)越來越敏感。多年來,半導(dǎo)體公司一直致力于減少反饋信號鏈中的這些非理想效應(yīng),而且這種趨勢很可能會持續(xù)下去。 ADuM7701就是為測量相電流而優(yōu)化的最新一代隔離式∑-?ADC示例。雖然ADC的性能很重要,但也很可能在反饋路徑的其余部分造成非理想效應(yīng)。本文不考慮ADC, 主要討論反饋路徑的其余部分。雖然本文著重介紹電機(jī)控制應(yīng)用,但它也適用于任何需要∑-? ADC緊密同步的其他系統(tǒng)。
T使用∑-? ADC時的典型信號鏈如圖1所示。模擬輸入電壓通過讓相電流通過一個電阻分流器來產(chǎn)生。∑-? ADC將模擬信號轉(zhuǎn)換成1位數(shù)據(jù)流,并提供電氣隔離,因此ADC之后的一切都與電機(jī)相電位隔離。轉(zhuǎn)換器之后是通過濾波方式執(zhí)行的解調(diào)。該濾波器將1位信號轉(zhuǎn)換為多位(M位)信號,并通過抽取過程降低數(shù)據(jù)更新速率。雖然濾波器抽取降低了數(shù)據(jù)速率,但速率通常仍然過高,無法匹配控制算法的更新速率。為了解決這個問題,我們增加了最后的降采樣階段。

圖1. 一種用于測量相電流的∑-?信號鏈。
本文假設(shè)濾波器和抽取級在FPGA中實現(xiàn),并且濾波器是一個三階sinc濾波器(sinc3)
Sinc濾波器同步
∑-? ADC和sinc濾波器的缺陷在于很難在同一個時域中進(jìn)行控制,并且缺少指定的采樣時刻。2 與具備專用的采樣保持電路的傳統(tǒng) ADC相比,這兩種濾波器都有一些令人擔(dān)憂的地方。不過也有辦法解決這個問題。如本節(jié)所示,將sinc濾波器與系統(tǒng)的其余部分同步,并在適當(dāng)?shù)臅r刻采樣相電流至關(guān)重要。如果未能正確做到這一點,測量結(jié)果將會大幅失真。
sinc濾波器的輸出并不代表該時刻∑-? ADC的輸入。相反,輸出是過去窗口期間輸入的加權(quán)平均值。這是由濾波器的脈沖響應(yīng)造成的。圖2a顯示了抽取率為5時sinc3的脈沖響應(yīng)。從圖中可以看出,濾波器輸出如何成為輸入序列的加權(quán)和,中間的采樣獲得較大權(quán)重,而序列開始/結(jié)束時的采樣權(quán)重較低。
在繼續(xù)討論之前,需要給出幾個基本定義。∑-? ADC時鐘,又稱 為調(diào)制器時鐘,表示為 fmod。抽取率(DR)決定抽取頻率(fdec),并與 fmod關(guān)聯(lián),如公式1所示:

圖2右側(cè)顯示了脈沖響應(yīng)對濾波器階躍響應(yīng)的影響。應(yīng)用該步驟時,濾波器輸出不受影響,濾波器在3個完整的抽取周期之后達(dá)到穩(wěn)定狀態(tài)。因此,sinc3濾波器的一些重要特性可以表述為:
● 群延遲為1.5個抽取周期
● 建立時間為3個抽取周期
在將濾波器與控制系統(tǒng)同步時,這些屬性非常重要,本文將始終會用到。
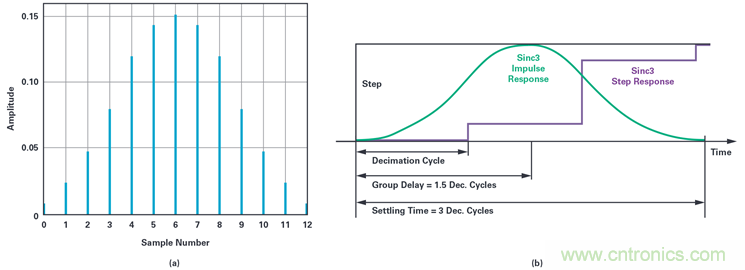
圖2.(a)濾波器抽取率為5的sinc濾波器脈沖響應(yīng)。(b)Sinc濾波器的階躍響應(yīng)以及與脈沖響應(yīng)的關(guān)系。
在討論sinc濾波器同步之前,必須先定義輸入信號的特性。這反過來又會定義濾波器的同步特性。
圖3顯示了由電壓源逆變器驅(qū)動的3相永磁電機(jī)的模擬相電流。 調(diào)制方式為空間矢量 PWM3,開關(guān)頻率為10 kHz。將電機(jī)加載到5 A峰值相電流和3000 rpm轉(zhuǎn)速。這種設(shè)置加上3個極對數(shù),可以得到6.67 ms電氣基本周期。
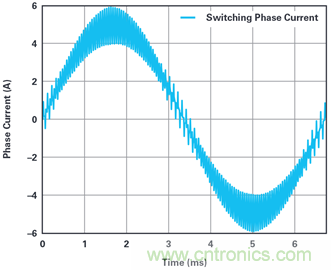
圖3. 采用空間矢量脈寬調(diào)制時的電機(jī)相電流。
相電流可以看作由兩個分量組成:平均分量和開關(guān)分量。出于控制目的,僅關(guān)注電流的平均分量,因此必須完全去除開關(guān)分量。要提取平均分量,最常見的方法是對與PWM同步的信號(用于電機(jī)終端)進(jìn)行采樣。如圖4所示。最上面的信號顯示相電流的開關(guān)波形,中間的信號顯示對應(yīng)的逆變器相位臂的高端PWM,最下面的信號顯示來自PWM定時器的同步信號。PWM同步信號在PWM周期的開始和中間進(jìn)行置位。為簡明起見,假設(shè)所有三相的占空比都是50%,意味著電流只有一個上升斜坡和一個下降斜坡。在PWM同步信號的上升沿,電流取其平均值,因此如果恰好在那一刻采樣電流,開關(guān)分量將被完全抑制。實際上,采樣保持電路相當(dāng)于一個在開關(guān)頻率上具有無限衰減的濾波器。
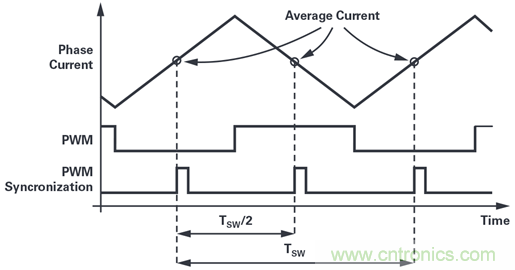
圖4. 在PWM周期的起始點和中心點處測量相電流會減弱電流紋波。
圖5顯示了將這種采樣應(yīng)用于圖3中所示波形時的結(jié)果。右側(cè)所示是實際相電流和采樣電流的波形放大圖。注意采樣保持過程如何完全消除紋波。
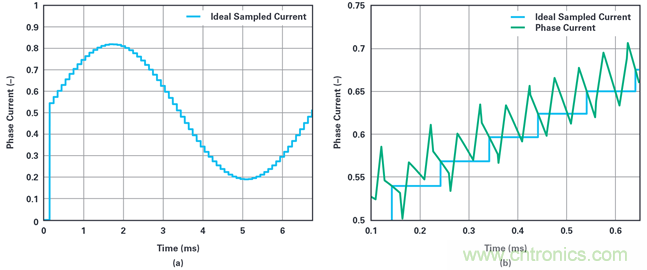
圖5.理想的相電流采樣:(a)理想的采樣相電流的基波周期,(b)相電流和采樣相電流的波形放大圖。
采樣電流以每單位表示,其中0 A映射到0.5,全比例值為8 A。選擇這個比例是為了更容易與后面的∑-?測量值進(jìn)行比較。圖5所示的結(jié)果為理想場景,采樣后只剩下基波分量。因此,可以將這些數(shù)據(jù)當(dāng)做比較∑-?測量值的基準(zhǔn)值。
∑-?測量和混疊
在理想的采樣保持ADC中,由于嚴(yán)格控制采樣時刻,所以能夠提取基波分量。然而,∑-?轉(zhuǎn)換是一個連續(xù)的采樣過程,紋波分量將不可避免地成為測量的一部分。
在∑-?轉(zhuǎn)換中,抽取率與信噪比(SNR)之間存在密切聯(lián)系。抽取率越高,輸出的有效位數(shù)(ENOB)越多。缺點是,隨著抽取率增加,群延遲也會增加,因此設(shè)計者必須在信號分辨率和反饋鏈的延遲之間折中考量。一般來說,與控制周期相比,應(yīng)將延遲保持在較小范圍。對于電機(jī)控制,典型的抽取率在128到256之間,這可以很好地平衡信噪比和群延遲。
在數(shù)據(jù)手冊規(guī)范中,通常使用256作為抽取率。例如,ADuM7701的ENOB為14位,抽取率為256。ENOB值如此高時,預(yù)計可以得到非常準(zhǔn)確的測量結(jié)果。為了驗證這一點,假設(shè)圖3所示的相電流是采用∑-? ADC在20 MHz時測量所得,數(shù)據(jù)流則由使用256抽取率的sinc3進(jìn)行解調(diào)。結(jié)果如圖6a所示。
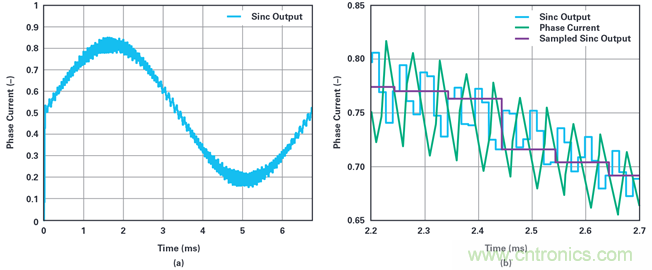
圖6. (a)sinc濾波器的輸出。(B)實際的相電流和sinc濾波器抽取輸出的波形放大圖。
相電流的基波分量非常明顯,但與圖5a所示的理想采樣相比,測量信號存在很大的噪聲。因此,雖然ADC和sinc濾波器本身提供了不錯的ENOB數(shù)量,但反饋信號的質(zhì)量卻很差。從圖6b可以看出其原因,該圖是sinc濾波器輸出和實際的相電流的波形放大圖。注意相電流的10 kHz開關(guān)分量是如何發(fā)生相移,以及幾 乎未被sinc濾波器衰減?,F(xiàn)在,假設(shè)在每個PWM周期執(zhí)行一次電機(jī)控制算法,并在周期開始時讀取最新的sinc濾波器輸出。實際上,sinc濾波器的輸出會向下采樣,以匹配控制算法的更新速率。向下采樣和得到的信號在圖6b中顯示為采樣sinc輸出。圖7a顯示了按照PWM速率濾波和采樣的整個基波周期的結(jié)果。
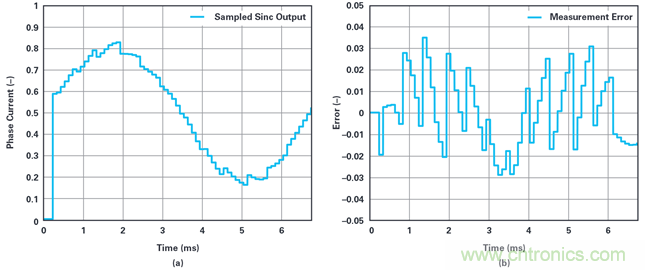
圖7. (a)sinc濾波器的采樣輸出。(b)測量誤差。
很明顯,相電流測量失真嚴(yán)重,因此控制性能會非常差。如此,應(yīng)該增加扭矩波紋,并且需要降低電流控制環(huán)路的帶寬。從理想測量值(圖5a)中減去圖7a中的測量值,就可以得到誤差(圖7b)。誤差約為原比例信號的7%,與預(yù)期的14 ENOB相差甚遠(yuǎn)。
這個∑-?測量和混疊場景演示了基于∑-?的非常常見的電流測量模式,以及它是如何引導(dǎo)設(shè)計人員得出“∑-? ADC不適合電機(jī)驅(qū)動器”這個結(jié)論的。但是,這個示例并沒有顯示出ADC本身的糟糕性能。相反,因為未能正確設(shè)置相電流測量值,所以余下信號鏈的性能欠佳。
ADC在幾兆赫(一般為10 MHz至20 MHz)下對輸入信號采樣,在抽取率為256時,sinc濾波器有效去除調(diào)制噪聲。在如此高的采樣率下,濾波器輸出中存在相電流紋波分量,在信號鏈的向下 采樣級,這可能成為一個問題(見圖1)。如果紋波分量沒有充分衰減,且電機(jī)控制算法以PWM速度消耗電流反饋,則結(jié)果會因為降采樣而產(chǎn)生混疊。
根據(jù)標(biāo)準(zhǔn)采樣理論,為了避免混疊,信號在一半采樣頻率以上時必須無能量。如果對∑-? ADC輸出向下采樣至10 kHz,那么5 kHz或更高頻率下的噪聲將會混疊到測量值中。如圖所示,在sinc濾波器之后,信號中還存在大量10 kHz開關(guān)噪聲。降低10 kHz噪聲的一種方法是增加抽取率,但是這樣做會導(dǎo)致不可接受的長時間群延遲。我們需要采用一種不同的方法。
通過同步改善測量
上一節(jié)討論的抗混疊方法的主要問題如圖8所示。sinc濾波器的輸出在與相電流開關(guān)分量無關(guān)的某個時刻被讀取。輸出信號被讀取時,濾波器根據(jù)脈沖響應(yīng)對輸入信號進(jìn)行加權(quán)平均。這個加權(quán)平均值有時跨越開關(guān)波形的低點,有時跨越高點。因此,用作反饋的信號含有明顯噪聲,頻率從0 Hz到PWM頻率的一半。
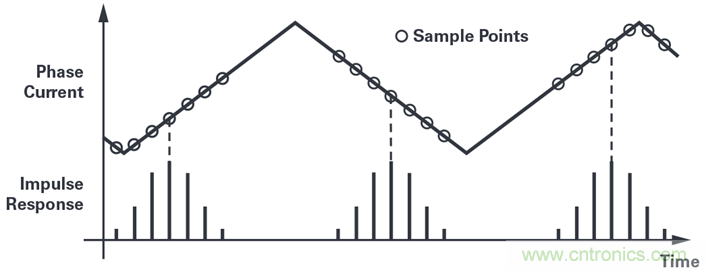
圖8. 脈沖響應(yīng)與開關(guān)波形無關(guān)。
∑-? ADC連續(xù)采樣,sinc濾波器輸出乘以每個PWM周期的測量值(通常10到20)。由于每次測量跨越3個抽取周期,所以脈沖響應(yīng)會重疊。為了簡化起見,圖8中僅顯示三個測量/脈沖響應(yīng)。
問題的根源在于:脈沖響應(yīng)沒有鎖定為電流的開關(guān)分量,而開關(guān)分量又被鎖定為PWM。解決方案是選擇抽取率,使每個PWM周期都有固定的整數(shù)抽取周期。例如,如果PWM頻率為10 kHz,調(diào)制器時鐘為20 MHz,抽取率為200,那么每個PWM周期正好有10個抽取周期。每個PWM周期有固定的采樣周期,脈沖響應(yīng)始 終鎖定為PWM,用于反饋的測量值在PWM周期內(nèi)的同一點被捕獲。采用這種同步方案的相電流測量如圖9a所示。
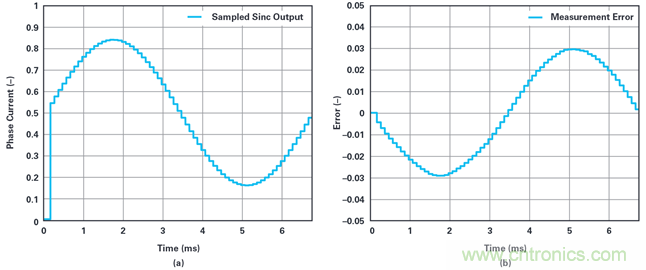
圖9.(a)脈沖響應(yīng)鎖定采用PWM時,sinc濾波器的采樣輸出。(b)測量誤差。
顯然,將響應(yīng)同步與PWM同步會產(chǎn)生積極的影響。噪聲會被消除,且乍一看,測量結(jié)果似乎與圖5a中的理想測量值相似。但是,用理想測量值減去∑-?測量值時,就會得出圖9b所示的誤差信號。誤差大小與圖7b中所示的值相似,但頻譜發(fā)生了變化?,F(xiàn)在,誤差是一階諧波,相當(dāng)于增益誤差。導(dǎo)致這種錯誤模式的原因如圖10所示。
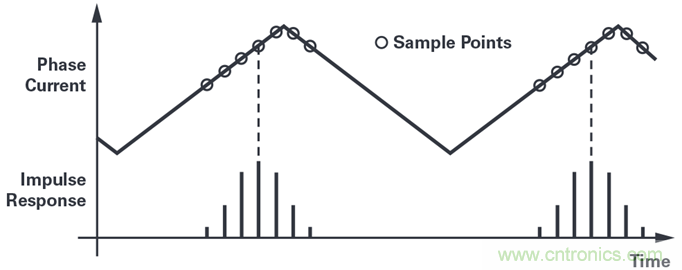
圖10. 脈沖響應(yīng)被鎖定為開關(guān)周期內(nèi)的某個固定點。
雖然消除了白噪聲誤差分量,但由于測量值受到開關(guān)分量的影響,信號仍然是失真的。在圖10中,注意sinc濾波器的脈沖響應(yīng)如何圍繞開關(guān)波形的峰值給出加權(quán)平均值。根據(jù)脈沖響應(yīng)相對于PWM的相位,偏差的大小僅受紋波電流的大小限制。如圖3所示,紋波分量的幅值在基波周期內(nèi)發(fā)生變化,基波電流峰值時紋波最高,過零點時紋波最低。因此,測量誤差為一階諧波分量。
為了消除一階諧波測量誤差,脈沖響應(yīng)必須始終以PWM周期的起始點或中心為中心,此時相電流正好等于其平均值。圖11顯示了以開關(guān)周期的起始點為中心的脈沖響應(yīng)。在這一點周圍,開關(guān)波形是對稱的,因此,通過在每一邊都有相同數(shù)量的測量點,紋波分量在這一點周圍均為零。
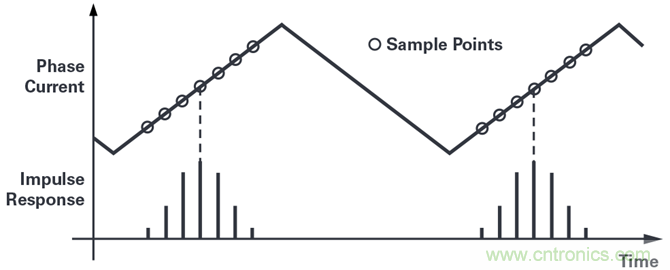
圖11. 脈沖響應(yīng)鎖定為開關(guān)周期,并對準(zhǔn)理想的測量點。
脈沖響應(yīng)鎖定,以平均電流的時刻為中心時,測量結(jié)果如圖12a所示,測量誤差如圖12b所示。作為理想的采樣測量,該信號不存在白噪聲和增益誤差。
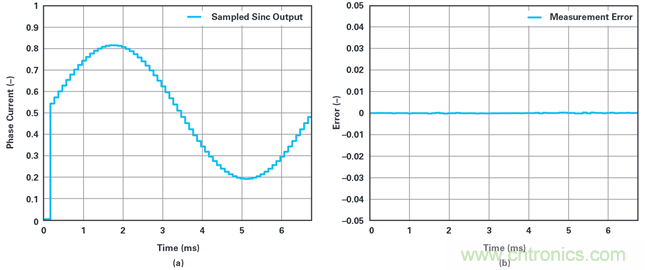
圖12. (a)脈沖響應(yīng)鎖定采用PWM,且以平均電流時刻為中心時,sinc濾波器的采樣輸出。(b)測量誤差。
結(jié)果表明,∑-?測量值的質(zhì)量不僅僅取決于抽取率。只有在無混疊時,普遍認(rèn)為“增加抽取率會提高ENOB”的這種觀點才是正確的??刂茷V波器相對于輸入信號的更新率和相位比抽取率更重要。例如,比較圖7(基于256的抽取率)和圖12(基于200的抽取率)。降低抽取率可顯著改善測量結(jié)果。
第1部分的結(jié)論
綜上所述,實現(xiàn)基于∑-?的優(yōu)化相電流測量值的條件如下:
● 三階sinc濾波器的脈沖響應(yīng)時間為3個抽取周期,這意味著數(shù)據(jù)需要3個抽取周期才能通過濾波器。
● 濾波器的脈沖響應(yīng)必須以平均電流時刻為中心。
● 脈沖響應(yīng)的1.5個采樣周期必須在平均電流時刻之前,另外1.5個采樣周期必須在平均電流時刻之后。
● sinc濾波器在PWM周期內(nèi)產(chǎn)生多個輸出,但只使用其中一個輸出。其余的輸出都被忽略。
第1部分至此結(jié)束。第2部分將介紹一種特別適合電機(jī)控制應(yīng)用的新sinc濾波器結(jié)構(gòu),并討論在FPGA上實現(xiàn)sinc濾波器的最佳方法。為了驗證本系列文章中討論的想法,第2部分還會展示在基于FPGA的3相伺服驅(qū)動器上實施的幾種測量。
參考電路
1Jens Sorensen、 Dara O’Sullivan:““理解電機(jī)驅(qū)動器電流環(huán)路中非理想效應(yīng)影響的系統(tǒng)方法。” Proceedings of PCIM ,歐洲,2016年。
2Jens Sorensen: ““用于電機(jī)控制的∑-?轉(zhuǎn)換。” Proceedings of PCIM ,歐洲,2015年。
3Ahmet M. Hava、 Russel J. Kerkman、Thomas A. Lipo:“適用于基于載波的PWM-VSI驅(qū)動器的簡單分析和圖形方法。”電氣與電子工程師協(xié)會匯刊電力電子學(xué)卷,1999年1月。
作者
Jens Sorensen 是ADI公司應(yīng)用工程師,負(fù)責(zé)工業(yè)應(yīng)用的電機(jī)控制解決方案。他的主要興趣在于控制算法、電源電子和控制處理器。Sorensen目前專注工業(yè)應(yīng)用,而在早期職業(yè)生涯中致力于開發(fā)家用電器和汽車應(yīng)用中的電機(jī)控制和電源電子元件。
Dara O''Sullivan是ADI公司自動化、能源與傳感器業(yè)務(wù)部電機(jī)和電源控制團(tuán)隊(MPC)的高級系統(tǒng)應(yīng)用工程師。其專長領(lǐng)域是交流電機(jī)控制應(yīng)用的功率轉(zhuǎn)換和控制。Dara擁有愛爾蘭科克大學(xué)工程學(xué)士、工程碩士和博士學(xué)位。自2001年起,Dara便從事研究、咨詢和工業(yè)領(lǐng)域的工業(yè)與可再生能源應(yīng)用方面的工作。
Shane O’Meara 是ADI公司的應(yīng)用工程師。他于 2011 年加入ADI公司,就職于愛爾蘭利默里克的精密轉(zhuǎn)換器應(yīng)用部門。他畢業(yè)于利默里克大學(xué),獲電子工程學(xué)士學(xué)位。
推薦閱讀:




